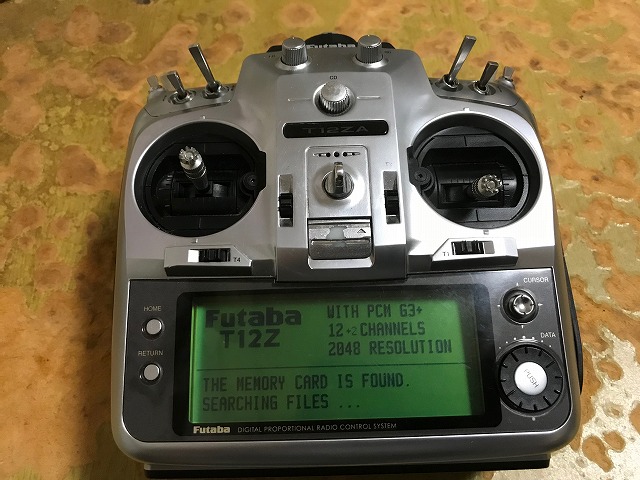
JP4in1 MultiProtocol TX Module! - 12Zと接続 [ラジコン]
もともと、S-FHSSを使おうとおもって、TM-14付きの12Zをオークションで購入したが、TM-14はS-FHSSに対応していないことが判明!調べてから買えよって話で、正直T8SG買っとけばよかった。なんて思ってたところに、Jp4in1が発売っということで、それを接続することにした。フタバのプロポでマルチプロトコルで技適つきこんな最強なプロポが手に入るかも!
いまだとT16になるのかもしれないけど。。。。
最近のプロポは、送信モジュールと送信機本体が一体になっているので、あとから交換なんてことはあまりないみたい。昔のは、周波数帯を変える必要があったので、交換することにより周波数帯を変えることをしてた。そのころ、空もののプロポのメーカは、三和とJRとフタバがあったが、フタバをずっと使ってた。
2.4Gが使用可能になったころから、フタバの送信モジュールのデザインが変わって小さくなってきた。また、2.4Gになったころから送信モジュールを変える必要するもなくなったので、いまのプロポは送信モジュールの変更はできなくなっている。
12Zは過渡期のプロポなので、交換が可能だけど、変更後のタイプになる。
Jp4in1は、JRの送信モジュールの筐体フォーマットを使用しており、フタバの旧型新型とも形が全く合わない。最近FRSKY型ともいうらしいが。
送信機12Zにつなげるための方法として、
1.Jp4in1を分解して、フタバ新型ケースに入れる。
2.Jp4in1を送信機の後ろに引っ付ける。
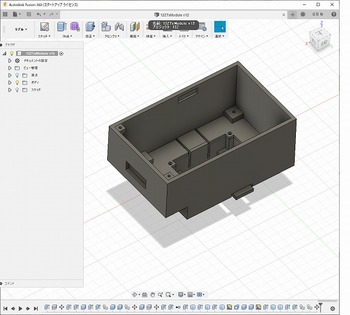
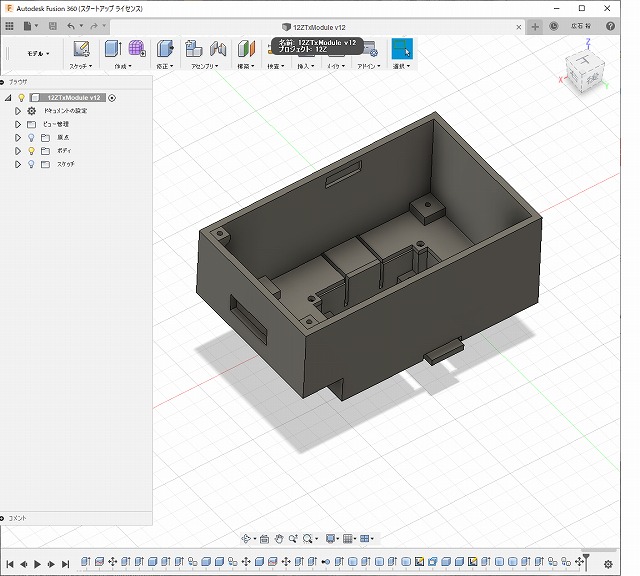
3.フタバの新型ケースの上にJRタイプのケースをマウントするパーツを3Dプリンタを使って作成する
もっとあるかもしれないけど、3番を選択。
まずは、マウンタを作成した。
もしなんかの間違いで、このSTLが欲しい人は、提供可能ですので、コメントかなんかでください
送信モジュールを外す方法を付け忘れたり、基板を取り付けるためののねじのためにモジュールが入るけど、ロックに引っかからなかったり、出力ケーブルの形状が気に入らなかったりで、12Zの電源電圧では、Jp4in1が起動しなかったり、何個もショットしたが、最終的には以下のようにした。
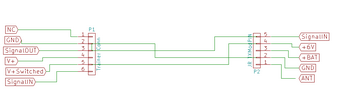
マウンタ内部の回路は以下のようになっている。
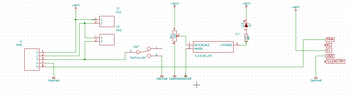
左端のコネクタは、XHの5ピンのもので、普通のユニバーサル基板(2.5mm)ピッチを使いたかったので、XHにした。自前で基盤が作れる人は、PHでもいいし、5ピンじゃなくて3と2に分けてもいいかもしれない。というか実運用ではそのほうがいい。
PHコネクタは、LI電池を接続する。マウンタの中で完結したかったので、400mAHのものを2つ、それぞれPHに接続すると2セルの電池が出来上がる。
電池のー端子はスイッチを介して、GNDと切断されており、スイッチを入れることで、電源電圧が、Jp4In1に供給される。
プロポとの接続はトレーナー端子を使うんだけれども、フタバのコネクタを昔は秋葉の部品屋でもあったような気がしたんだけど、最近はどこにも売ってない(探しもしてないけど)。
で、フタバ純正のDSCコードを使用する(フタバの部品番号302572)。多分9Z以前のものでは、このケーブルを適切に配線することで、Jp4In1が使えるようになると思います。おいらは、電源の話もあるので、コネクタのみ使います。まず、コネクタのケースを開けると、赤白黒の線がはんだ付けされているがはんだごてであっためて外す。
4と5にショートするジャンパーが飛んでいるので、それも外す。ケーブルをつなげると、電源が入るようにしたい場合は、そのまま外さなくていい。
トレーナコネクタをいじらなくても、そのままつなげる(黒いコネクタをXHに付け替える)ことができれば、それでいい。
XHコネクタの5番にトレーナコネクタの3番、XHの4番にトレーナコネクタの2番を接続する。
では、XHの1,2,3番ピンは何に使うかというと、LI電池の充電に使う。このXHの5ピンを準電するときと、使うときで、つけ変えることになるので、別々のほうがいいかもしれない。
いまは、終わったばっかりでめんどくさいからいずれやることにしよう。
電源と、PPM信号が正常にJp4In1に供給できれば、あとはソフトウェア次第でちゃんと動く。
いまだとT16になるのかもしれないけど。。。。
最近のプロポは、送信モジュールと送信機本体が一体になっているので、あとから交換なんてことはあまりないみたい。昔のは、周波数帯を変える必要があったので、交換することにより周波数帯を変えることをしてた。そのころ、空もののプロポのメーカは、三和とJRとフタバがあったが、フタバをずっと使ってた。
2.4Gが使用可能になったころから、フタバの送信モジュールのデザインが変わって小さくなってきた。また、2.4Gになったころから送信モジュールを変える必要するもなくなったので、いまのプロポは送信モジュールの変更はできなくなっている。
12Zは過渡期のプロポなので、交換が可能だけど、変更後のタイプになる。
Jp4in1は、JRの送信モジュールの筐体フォーマットを使用しており、フタバの旧型新型とも形が全く合わない。最近FRSKY型ともいうらしいが。
送信機12Zにつなげるための方法として、
1.Jp4in1を分解して、フタバ新型ケースに入れる。
2.Jp4in1を送信機の後ろに引っ付ける。
3.フタバの新型ケースの上にJRタイプのケースをマウントするパーツを3Dプリンタを使って作成する
もっとあるかもしれないけど、3番を選択。
まずは、マウンタを作成した。
もしなんかの間違いで、このSTLが欲しい人は、提供可能ですので、コメントかなんかでください
送信モジュールを外す方法を付け忘れたり、基板を取り付けるためののねじのためにモジュールが入るけど、ロックに引っかからなかったり、出力ケーブルの形状が気に入らなかったりで、12Zの電源電圧では、Jp4in1が起動しなかったり、何個もショットしたが、最終的には以下のようにした。
| 形状 | Jp4in1を全体に包むようなケースを作り、12Zの送信モジュールベイに乗せられるようにする。 |
| 電池 | 2セルのリチウムイオン電池を使用。動力用のものではいいのがなかったので、普通の2次電池2Cまでは放電可能なもの |
| 外部接続 | プロポとの接続に2本、電池の充電に3本の配線が必要なので、これらをまとめて、5ピンのXHとする |
| 電源回路 | 直列2セルの+電極をモジュールのV+に接続し、ー電極をスイッチの片側、もう片側をGNDに接続する。これにより、スイッチを接続するとモジュールに電源が供給される。 |
| パイロット | TL431と分圧、半固定抵抗による電池の消耗具合を知らせる回路を作ったけど、オフ時の電流が意外と流れるため完全に消灯しない。 |
マウンタ内部の回路は以下のようになっている。
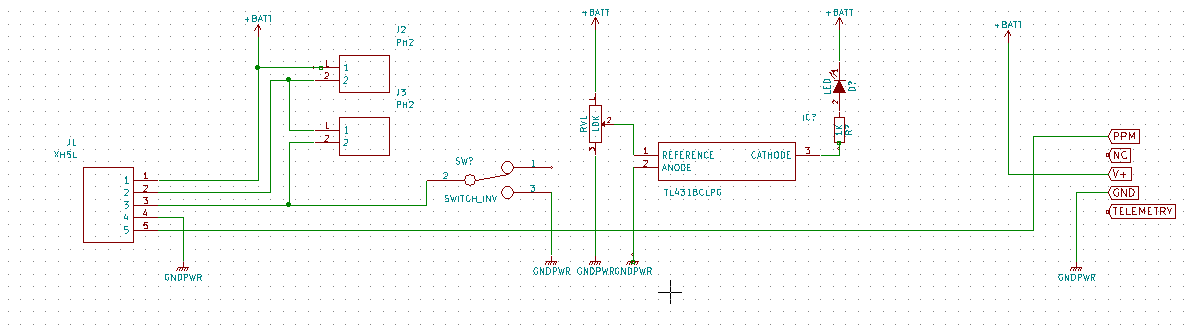
左端のコネクタは、XHの5ピンのもので、普通のユニバーサル基板(2.5mm)ピッチを使いたかったので、XHにした。自前で基盤が作れる人は、PHでもいいし、5ピンじゃなくて3と2に分けてもいいかもしれない。というか実運用ではそのほうがいい。
PHコネクタは、LI電池を接続する。マウンタの中で完結したかったので、400mAHのものを2つ、それぞれPHに接続すると2セルの電池が出来上がる。
電池のー端子はスイッチを介して、GNDと切断されており、スイッチを入れることで、電源電圧が、Jp4In1に供給される。
プロポとの接続はトレーナー端子を使うんだけれども、フタバのコネクタを昔は秋葉の部品屋でもあったような気がしたんだけど、最近はどこにも売ってない(探しもしてないけど)。
で、フタバ純正のDSCコードを使用する(フタバの部品番号302572)。多分9Z以前のものでは、このケーブルを適切に配線することで、Jp4In1が使えるようになると思います。おいらは、電源の話もあるので、コネクタのみ使います。まず、コネクタのケースを開けると、赤白黒の線がはんだ付けされているがはんだごてであっためて外す。
4と5にショートするジャンパーが飛んでいるので、それも外す。ケーブルをつなげると、電源が入るようにしたい場合は、そのまま外さなくていい。
トレーナコネクタをいじらなくても、そのままつなげる(黒いコネクタをXHに付け替える)ことができれば、それでいい。
XHコネクタの5番にトレーナコネクタの3番、XHの4番にトレーナコネクタの2番を接続する。
では、XHの1,2,3番ピンは何に使うかというと、LI電池の充電に使う。このXHの5ピンを準電するときと、使うときで、つけ変えることになるので、別々のほうがいいかもしれない。
いまは、終わったばっかりでめんどくさいからいずれやることにしよう。
電源と、PPM信号が正常にJp4In1に供給できれば、あとはソフトウェア次第でちゃんと動く。
JP4in1 MultiProtocol TX Module! ー 12Z側の設定 [ラジコン]
バインドするまでに、実は設定する必要があるんだけど、
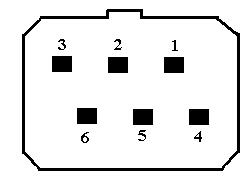
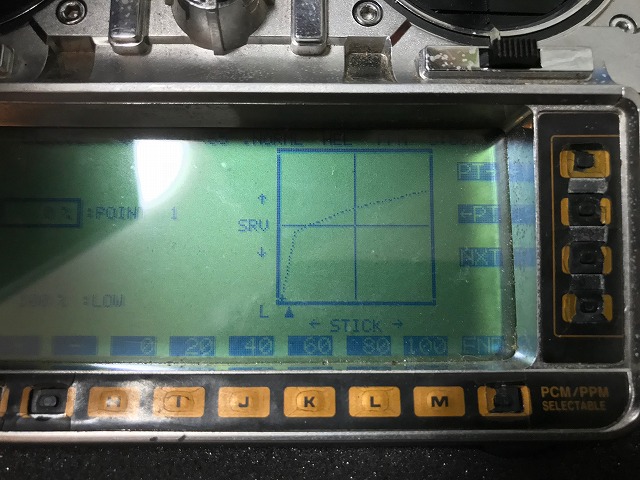
トレーナーケーブルを用いて、PPM出力をするためには、トレーナーモードを有効にする必要がある。
トレーナーモードを有効にするには、いろいろ方法があって、フタバのトレーナーケーブルとかDSCケーブルは、接続すると電源が入り、自動的に出力されるようになっているが、毎回トレーナーケーブルコネクタをとったりつけたりするのは、あまりやりたくない。
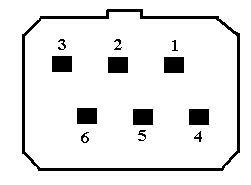
このずで、3番がPPM出力、2番がGND、4番が電池出力、5番が電源スイッチを通った後の電源となっている。自動起動にするために、4と5がショートされている。しかし、電源を気にしないのであれば、信号とGNDだけつなげればいい。
12Zでは、トレーナー出力をするためには、SYSTEMメニューのTRAINERメニューを選択し、

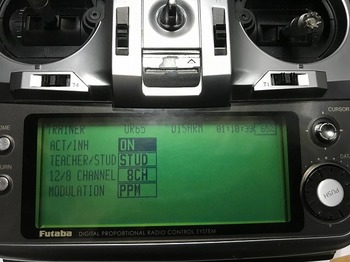
を設定する。
これで、トレーナーケーブルから、PPM信号が出力される。
PPM信号が出力されると、モジュールが正常に動作を開始し、機体とのバインド等の動作も
行えるようになる。
あとは、送信機側の設定とか、BetaFliightの設定とかで、自分で飛ばしやすいように調整すればいい。
トレーナーケーブルを用いて、PPM出力をするためには、トレーナーモードを有効にする必要がある。
トレーナーモードを有効にするには、いろいろ方法があって、フタバのトレーナーケーブルとかDSCケーブルは、接続すると電源が入り、自動的に出力されるようになっているが、毎回トレーナーケーブルコネクタをとったりつけたりするのは、あまりやりたくない。
このずで、3番がPPM出力、2番がGND、4番が電池出力、5番が電源スイッチを通った後の電源となっている。自動起動にするために、4と5がショートされている。しかし、電源を気にしないのであれば、信号とGNDだけつなげればいい。
12Zでは、トレーナー出力をするためには、SYSTEMメニューのTRAINERメニューを選択し、
| ACT/INH | ON |
| TRAINER/STUD | STUD |
| 12/8CHANNEL | 8CH |
| MODULATION | PPM |

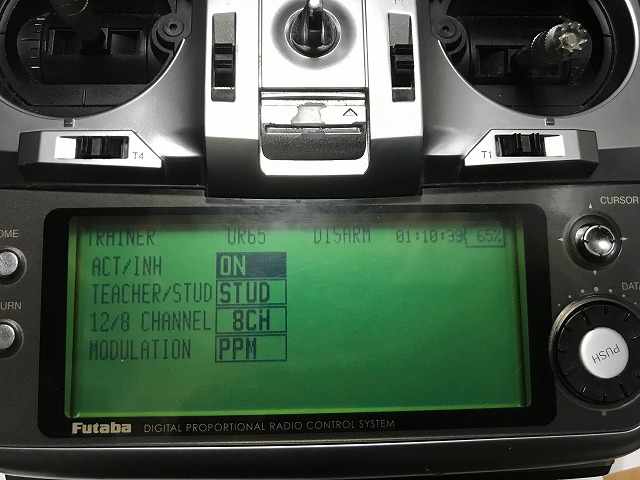
を設定する。
これで、トレーナーケーブルから、PPM信号が出力される。
PPM信号が出力されると、モジュールが正常に動作を開始し、機体とのバインド等の動作も
行えるようになる。
あとは、送信機側の設定とか、BetaFliightの設定とかで、自分で飛ばしやすいように調整すればいい。
JP4in1 MultiProtocol TX Module! - 送信機との接続 [DIY]
モジュールのファームが新しくなったので、バインドをしたい。
で、緑のランプはついてるけど、赤のランプはゆっくり点滅しているので、なんじゃらほいこれはとなり、Githubのdocsの中を探し手、TroubleShoutingの中にその記述がある。
見てみると、なんだかゆっくりとブリンクしているので、どちらにしても、送信機からの信号が必要らしい。
とすると送信機からの信号をつなげないといけない。
今回、接続を想定する送信機は、いわずとしれた12Zなので、まずは接続方法を考える。
考えられる接続方法は、2つ。
1.送信機と送信モジュール間の信号をいただく。
2.トレーナーケーブルからの信号をいただく。
1番は、信号を宇悪扱うことができれば、プロトコル変更まで、対応できる可能性があるが、
(40Mのバンド周波数をもらって、対応表で設定するなど)、どんな信号が出てるかもわからないからこれはできない。
2番は、トレーナからの信号がPPM8chを出せれば、うまくいきそうで、それは、設定すれば
うまくいったので、こちらを採用する。
ということで、図ののようなケーブルを作成したが、モジュールが起動しない(緑ランプがつかない。Jp4in1内の送信モジュール内では、AMS1175Vというのが5Vの電源を供給し、さらにそこから3.3Vを作っているが、12Zの電池出力は、6V付近だったので、多分レギュレータのドロップ電圧の中に巻き取られて、5Vが安定的に作れなくなっていると想像した。そこで、電源のラインを切断して、別途2セルのバッテリーをつけることにした。そのあたりの話は、いったん分けよう。しかし、送信機のSignalOutをPPMに接続し、V+に2セルの電池を設定することで、十分に起動することが可能になった。
プロトコル設定
機体と話しをするプロトコルを設定する。設定の仕方は、プロトコルグループ番号(バンク)を設定し、さらにプロトコル番号を設定する。16進ロータリースイッチだけだと、最大15(もしくは16)しか設定できないけど、バンクを使って70プロトコルにまで対応でき量になっている。
おいらが使いたいのは、FRSKYDなので、バンク1で、プロトコル番号10となる。
でこの数字を覚えておいて、モジュールに設定する。
PPMモードでのプロトコル設定に必要な手順は2つ。
バンクを設定する
プロトコル番号を設定する。
となる。
バンク番号を設定するには、
1.ロータリースイッチを15に合わせる。15って、0に合わせて1クリック左。
2.電源を入れる。(もしすでに入っていた場合には、一回切ってから)
3.現在のバンク番号をLEDにて通知される。”ちかっちかっ”って光ってしばらく消灯する。この場合だと現在選択されているバンクは2番。
4.バンクが選択される=(ちかっちかっがバンク番号になる)まで、Jp4in1のBINDボタンをクリックする。Jp4in1がバンク切り替えを受け付けると、1秒間赤のLEDが点灯し、その後、3のようにバンクが示されるから、4の手順でバンク番号を指定する。
5.対象のバンク番号になったら電源を切る。
次にプロトコル番号を設定する。
プロトコル番号を設定するには、電源が切れている状態で、ロータリースイッチに、先ほどのプロトコル番号を設定する。FrSkyDだとプロトコル番号が、10なので、8までダイアルを回し、さらに2個左側に回す。
これで、電源を入れると、バンク番号とプロトコル番号が正しく認識され、送信モジュールが、稼働するようになる。
プロトコル表には、同じエントリが複数設定可能なようで、実際に設定されているようだ。
機体とのバインドは、機体側の受信機を受信モードに設定する。例えば、UR65とかだと電源を入れた後バインドボタンを押してバインドモードに設定する。すると機体のLEDがゆっくりブリンクする。
その後、バインドボタンを押しながらJp4in1の電源を入れる。ここで、うまくいけば、バインドが完了する。
FRSKYやSHFSSのモードだと、送信周波数の微調整が必要な場合があるそうだ。うまくいかない場合は、PPMモードでは、ソースに強制チューニング値を設定して、ダウンロードを繰り返して、探すなんてこと必要になるらしいが、コンパイルとアップロードを繰り返しながら、値を探すなんてのはやってられないと思うので、その時は、Jp4in1と受信機のペアを、OpenTXの送信機に接続して、シリアルモードで、設定するのがいいと思う。どうしても自力でやるときは、先ほどのコンパイル&アップロードで、値を探すことになる。
このあたりも
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Frequency_Tuning.md
に書いてあるので、知らで確認してください。
で、緑のランプはついてるけど、赤のランプはゆっくり点滅しているので、なんじゃらほいこれはとなり、Githubのdocsの中を探し手、TroubleShoutingの中にその記述がある。
| LED | 表示状態 | 意味 |
| 緑 | 点灯 | 電源オン |
| 緑 | 消灯 | 電源オフ |
| 赤 | 消灯 | プログラムが走っていないか設定されたプロトコルに対応する送信モジュールがない。 |
| 赤 | フラッシュ(0.05秒点灯0.1秒消灯) | 正しくないプロトコルが選択されている(コンパイル時設定がおかしいか、プロトコル番号がおかしい) |
| 赤 | 反転フラッシュ(1秒点灯、0.1秒消灯) | 送信機による設定や、チャネルからのバインド開始イベントを待っている |
| 赤 | 早い周期のブリンク(0.1秒点灯、0.1秒消灯) | バインド実行中 |
| 赤 | ゆっくりの周期のブリンク(0.5秒点灯、0.5秒消灯) | シリアルプロトコルが選択されているが、有効な信号が検出できない |
| 赤 | さらにゆっくりな周期のブリンク(1秒点灯、1秒消灯) | PPM信号が選択されているが、有効な信号が検出できない |
見てみると、なんだかゆっくりとブリンクしているので、どちらにしても、送信機からの信号が必要らしい。
とすると送信機からの信号をつなげないといけない。
今回、接続を想定する送信機は、いわずとしれた12Zなので、まずは接続方法を考える。
考えられる接続方法は、2つ。
1.送信機と送信モジュール間の信号をいただく。
2.トレーナーケーブルからの信号をいただく。
1番は、信号を宇悪扱うことができれば、プロトコル変更まで、対応できる可能性があるが、
(40Mのバンド周波数をもらって、対応表で設定するなど)、どんな信号が出てるかもわからないからこれはできない。
2番は、トレーナからの信号がPPM8chを出せれば、うまくいきそうで、それは、設定すれば
うまくいったので、こちらを採用する。
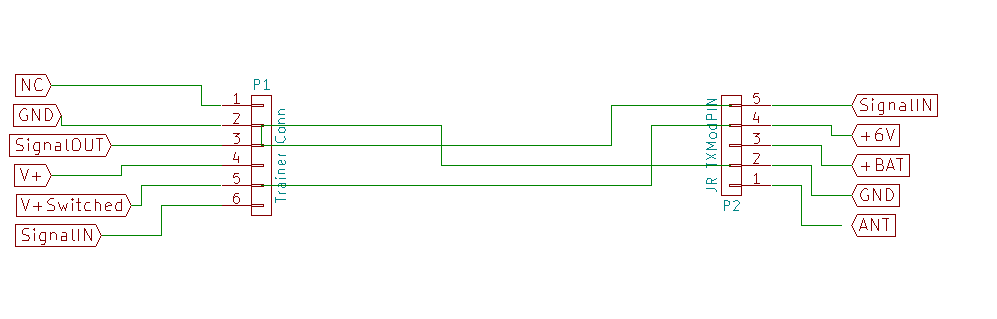
ということで、図ののようなケーブルを作成したが、モジュールが起動しない(緑ランプがつかない。Jp4in1内の送信モジュール内では、AMS1175Vというのが5Vの電源を供給し、さらにそこから3.3Vを作っているが、12Zの電池出力は、6V付近だったので、多分レギュレータのドロップ電圧の中に巻き取られて、5Vが安定的に作れなくなっていると想像した。そこで、電源のラインを切断して、別途2セルのバッテリーをつけることにした。そのあたりの話は、いったん分けよう。しかし、送信機のSignalOutをPPMに接続し、V+に2セルの電池を設定することで、十分に起動することが可能になった。
プロトコル設定
機体と話しをするプロトコルを設定する。設定の仕方は、プロトコルグループ番号(バンク)を設定し、さらにプロトコル番号を設定する。16進ロータリースイッチだけだと、最大15(もしくは16)しか設定できないけど、バンクを使って70プロトコルにまで対応でき量になっている。
| バンク番号 | プロトコル番号 | プロトコル |
| 1 | 1 | Flysky |
| 1 | 2 | AFHD52A |
| 1 | 3 | AFHD52A |
| 1 | 4 | AFHD52A |
| 1 | 5 | AFHD52A |
| 1 | 6 | AFHD52A |
| 1 | 7 | AFHD52A |
| 1 | 8 | SFHSS |
| 1 | 9 | FrSkyV |
| 1 | 10 | FrSkyD |
| 1 | 11 | FrSkyX(CH_16) |
| 1 | 12 | FrSkyX(EU_16) |
| 1 | 13 | DEVO |
| 1 | 14 | Wk2x01 |
| 2 | 1 | DSM(DSM2_11) |
| 2 | 2 | DSM(DSM2_22) |
| 2 | 3 | DSM(DSMX_11) |
| 2 | 4 | DSM(DSMX_22) |
| 2 | 5 | DSM(DSM2_11) |
| 2 | 6 | DSM(DSM2_22) |
| 2 | 7 | DSM(DSMX_11) |
| 2 | 8 | DSM(DSMX_22) |
| 2 | 9 | SLT |
| 2 | 10 | HUBSUN(H107) |
| 2 | 11 | HUBSUM(H301) |
| 2 | 12 | HUBSUN(H501) |
| 2 | 13 | HiSKy |
| 2 | 14 | V2X2 |
| 3 | 1 | ESKY |
| 3 | 2 | ESKY150 |
| 3 | 3 | ASSAN |
| 3 | 4 | CORONA |
| 3 | 5 | SYMAX |
| 3 | 6 | KN_WLTOYS |
| 3 | 7 | BAYANG |
| 3 | 8 | BAYANG(H8S3D) |
| 3 | 9 | BAYANG(X16_AH) |
| 3 | 10 | BAYANG(IRDRONE) |
| 3 | 11 | H8_3D(H8_3D) |
| 3 | 12 | H8_3D(H20H) |
| 3 | 13 | H8_4D(H20MINI) |
| 3 | 14 | H8_3D(H30MINI) |
| 4 | 1 | M3XQ(WLH80) |
| 4 | 2 | M3XQ(X600) |
| 4 | 3 | M3XQ(X800) |
| 4 | 4 | M3XQ(H260) |
| 4 | 5 | M3XQ(E010) |
| 4 | 6 | M3XQ(H26WH) |
| 4 | 7 | HONTAI(HONTAI) |
| 4 | 8 | HONTAI(JJRCX1) |
| 4 | 9 | HONTAI(XSC1) |
| 4 | 10 | HONTAI(FQ777_951) |
| 4 | 11 | Q303(Q303) |
| 4 | 12 | Q303(CX35) |
| 4 | 13 | Q303(CX10D) |
| 4 | 14 | Q303(CX10WD) |
| 5 | 1 | CX10(CX10_GREEN) |
| 5 | 2 | CX10(CX10_BLUE) |
| 5 | 3 | CX10(DM007) |
| 5 | 4 | CX10(JC3015_1) |
| 5 | 5 | CX10(JC3015_2) |
| 5 | 6 | CX10(MK33041) |
| 5 | 7 | Q2X2(Q222) |
| 5 | 8 | Q2X2(Q242) |
| 5 | 9 | Q2X2(Q282) |
| 5 | 10 | CG023(C023) |
| 5 | 11 | CG023(YD829) |
| 5 | 12 | FQ777 |
| 5 | 13 | YD717(YD717) |
| 5 | 14 | MT99XX(MT99) |
おいらが使いたいのは、FRSKYDなので、バンク1で、プロトコル番号10となる。
でこの数字を覚えておいて、モジュールに設定する。
PPMモードでのプロトコル設定に必要な手順は2つ。
バンクを設定する
プロトコル番号を設定する。
となる。
バンク番号を設定するには、
1.ロータリースイッチを15に合わせる。15って、0に合わせて1クリック左。
2.電源を入れる。(もしすでに入っていた場合には、一回切ってから)
3.現在のバンク番号をLEDにて通知される。”ちかっちかっ”って光ってしばらく消灯する。この場合だと現在選択されているバンクは2番。
4.バンクが選択される=(ちかっちかっがバンク番号になる)まで、Jp4in1のBINDボタンをクリックする。Jp4in1がバンク切り替えを受け付けると、1秒間赤のLEDが点灯し、その後、3のようにバンクが示されるから、4の手順でバンク番号を指定する。
5.対象のバンク番号になったら電源を切る。
次にプロトコル番号を設定する。
プロトコル番号を設定するには、電源が切れている状態で、ロータリースイッチに、先ほどのプロトコル番号を設定する。FrSkyDだとプロトコル番号が、10なので、8までダイアルを回し、さらに2個左側に回す。
これで、電源を入れると、バンク番号とプロトコル番号が正しく認識され、送信モジュールが、稼働するようになる。
プロトコル表には、同じエントリが複数設定可能なようで、実際に設定されているようだ。
機体とのバインド
機体とのバインドは、機体側の受信機を受信モードに設定する。例えば、UR65とかだと電源を入れた後バインドボタンを押してバインドモードに設定する。すると機体のLEDがゆっくりブリンクする。
その後、バインドボタンを押しながらJp4in1の電源を入れる。ここで、うまくいけば、バインドが完了する。
FRSKYやSHFSSのモードだと、送信周波数の微調整が必要な場合があるそうだ。うまくいかない場合は、PPMモードでは、ソースに強制チューニング値を設定して、ダウンロードを繰り返して、探すなんてこと必要になるらしいが、コンパイルとアップロードを繰り返しながら、値を探すなんてのはやってられないと思うので、その時は、Jp4in1と受信機のペアを、OpenTXの送信機に接続して、シリアルモードで、設定するのがいいと思う。どうしても自力でやるときは、先ほどのコンパイル&アップロードで、値を探すことになる。
このあたりも
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Frequency_Tuning.md
に書いてあるので、知らで確認してください。
JP4in1 MultiProtocol TX Module ーソースのダウンロードとArduinoの準備 [DIY]
ソースのダウンロード
ファームウェアのアップデートに関して、二つの方法があり、
コンパイル済みバイナリのダウンロードして、それを書き込む方法
ソースからコンパイルをローカルで行い、できたバイナリを書き込む方法
の二つがあるが、ここでは、自力でコンパイルを行って、書き込む方法を選択する。
まずはソースのダウンロードについて。
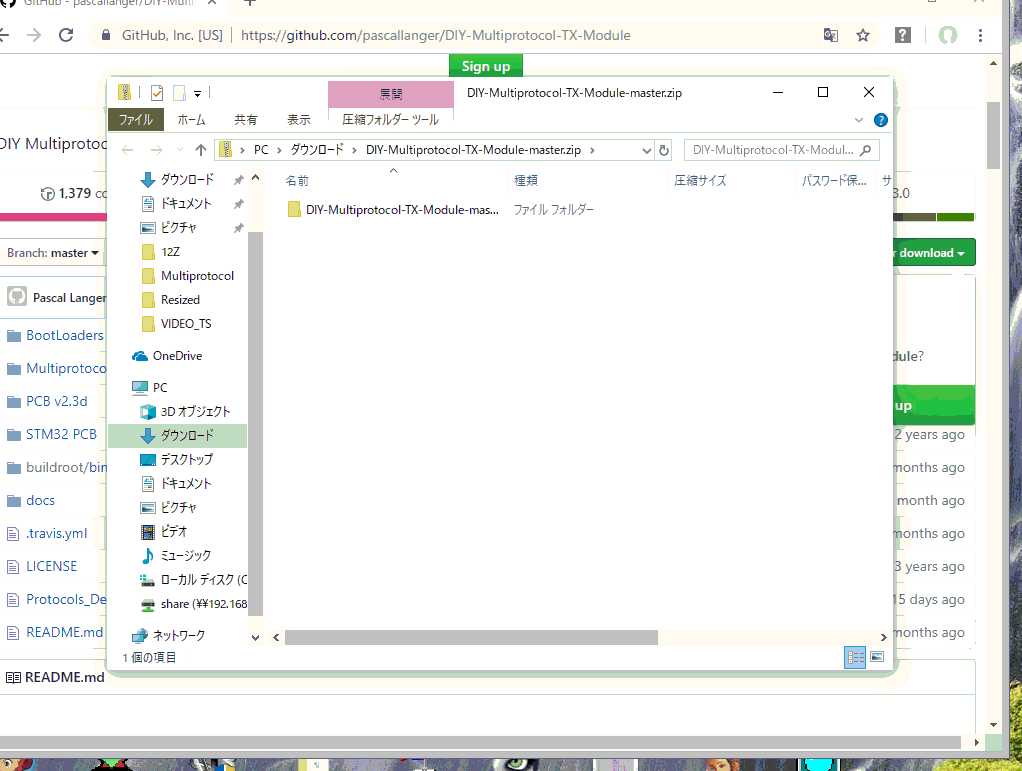
前のページでも書いたけど、Jp4in1は、ハードウェアの提供のみで、ソースはおまけで、自分でバンバンしなさいと書いてあり、そこに、ソースのありかが書いてある。まずは、そこに行ってみる
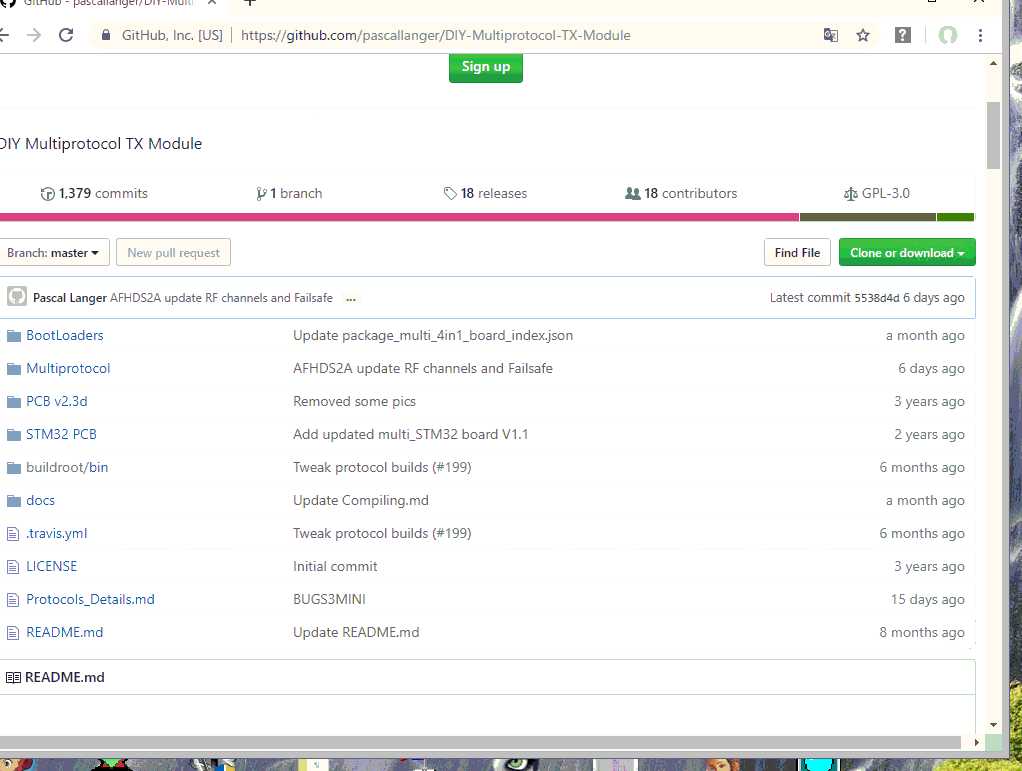
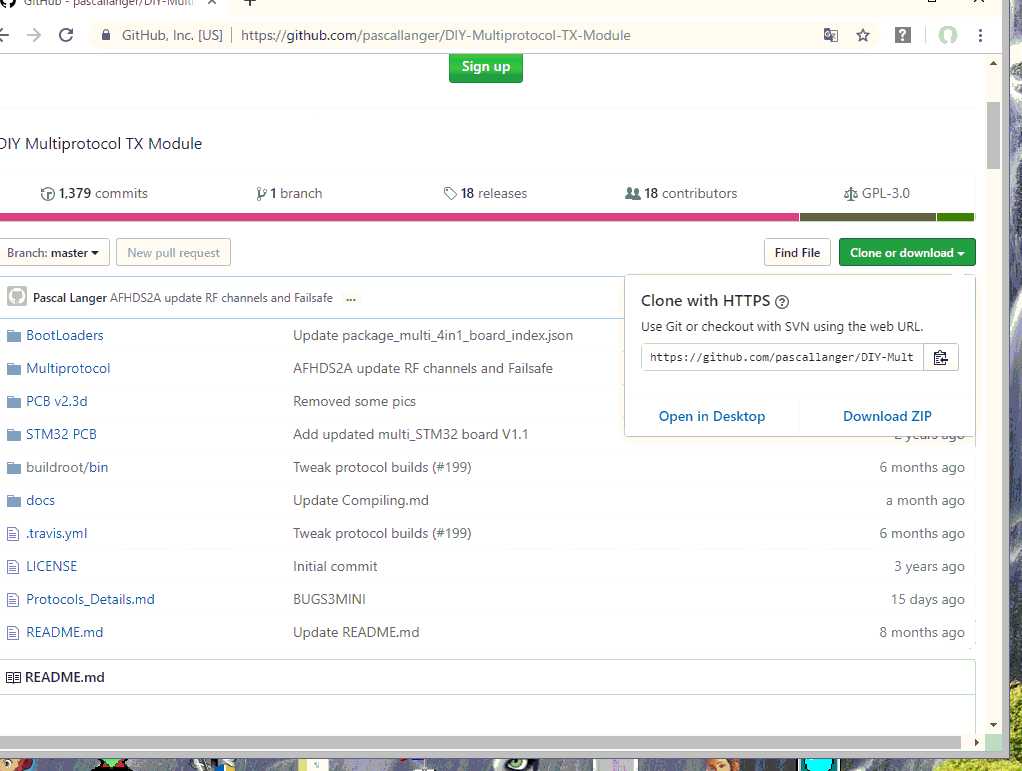
すると右のほうに”Clone or Download"というボタンが出てくるので、それを押してZIPでダウンロードする。
でダウンロードしたものを、展開すると次のようになっているので、適当な場所に展開する。
Arduinoのダウンロード
DIY Mulitiprotocol のコンパイルは、Arduinoを使用する。Arduinoは、AVRのマイコンを使って、インターフェースなど共通規定化し、いろいろなセンサ等のハードウェアをお試しできるシステムがあって、ここでは、そのIDEを使用する。Arduinoの標準では、AVRのコンパイラが付いてくる、Jp4in1はSTM32を使うので、別途コンパイラを用意しないといけないが、このソースを開発したPascal Langerさんは、ボード定義や、コンパイラを含めたパッケージを用意してくれているので、それをダウンロードするだけで、コンパイルが可能となる。
まずは、Arduinoのダウンロードとインストールをするわけだけど、それはいろんなところで紹介されてるので、そちらで。。
いまからJp4in1をコンパイルするための、Arduinoの設定をするわけだけど、詳しいことは、
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Arduino_IDE_Boards.md
に書いてあるので、英語で蕁麻疹が出ない人はこっちに当たったほうが正確です。
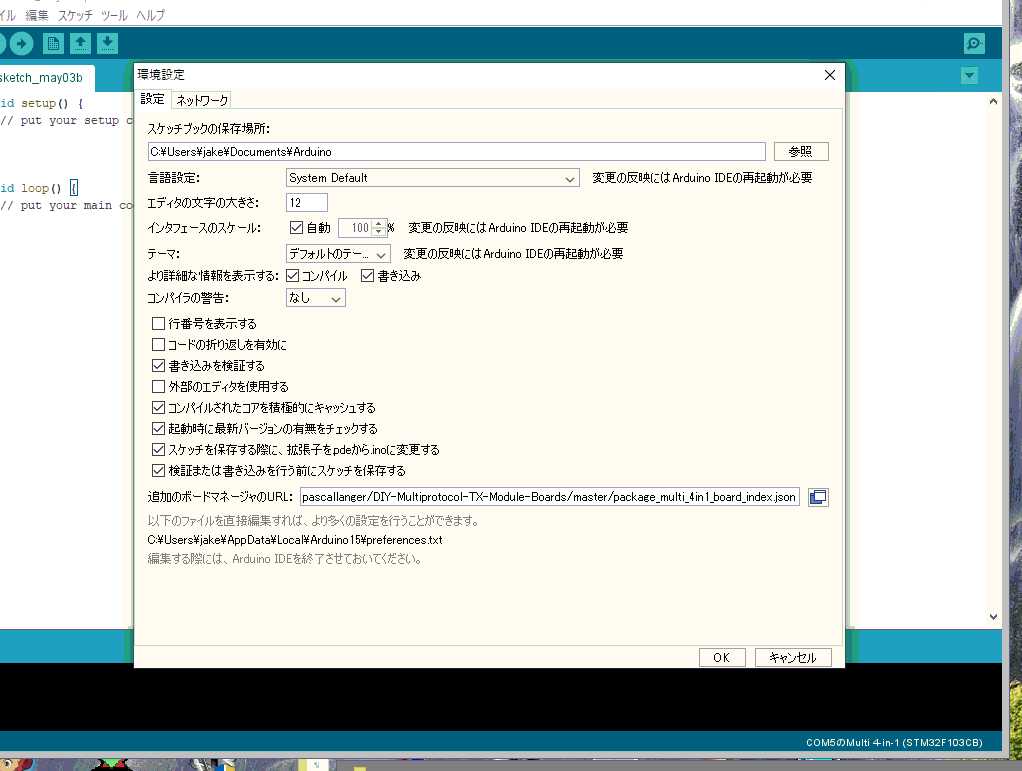
Arduinoを起動して、”ファイル”→”環境設定”のダイアログを開き、
追加のボードマネージャのURLに、以下を入力する。
https://raw.githubusercontent.com/pascallanger/DIY-Multiprotocol-TX-ModuleBoards/master/package_multi_4in1_board_index.json
そしてOKを押して、
”ツール”→”ボード:xxxxxx*→”ボードマネージャ”を選択して、

検索ボックスに ”multi"と入力すると、Pascal Langer さんのパッケージが3つ表示される。そのうちSTM32って書いてあるやつだけをダウンロードすればいい。
STM32書いてあるところの箱を一回クリックすると、右下にバージョン選択ボックスとインストールボタンが表示されるので、それで、インストールをクリックする。

するとコンパイルが可能になる。
検証コンパイル
コンパイラの準備ができたので、コンパイルを実施する。がその前に、
ボードを選択する必要がある。
”ツール”→”ボード:xxxx”→ボードマネージャの一覧に
Multi 4-in-1 (STM32F103CB)
が追加されているのでそれを選択する。
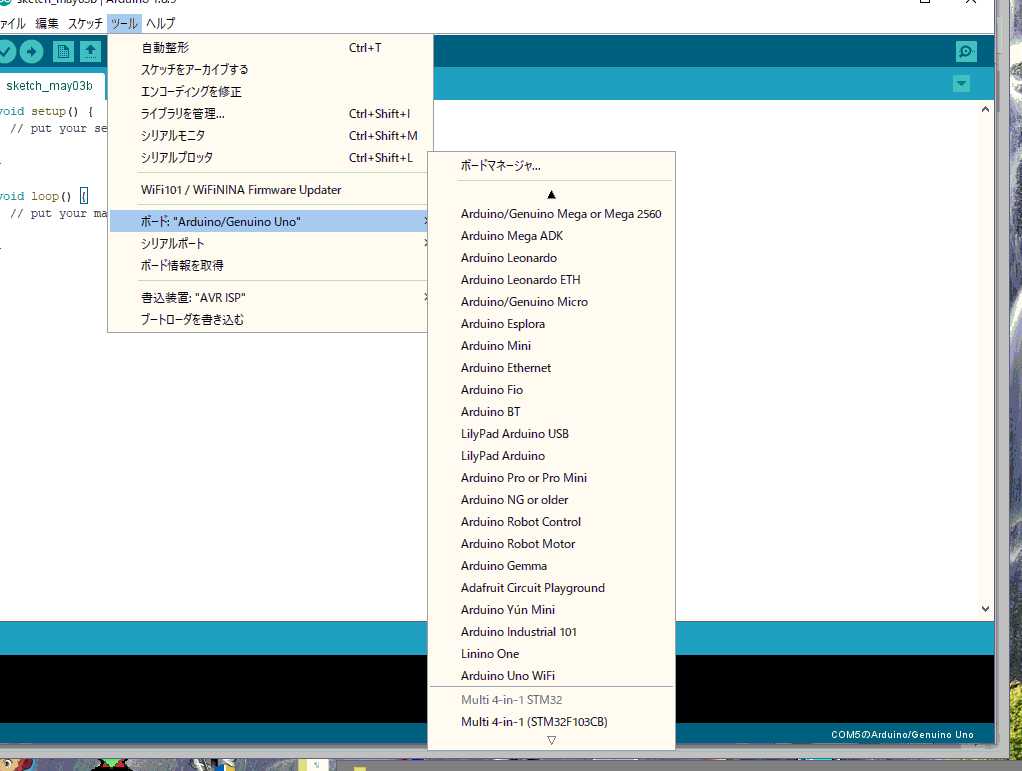
選択がうまくいくと、Arduinoのフレームの右下の表示がCOM5のMulti 4-in-1 (STM32F103CB)のように変わる。COM5の番号はここでは不問。
そこで先ほどダウンロードして、展開したソースファイルから、
DIY-Multiprotocol-TX-Module\Multiprotocol\Multiprotocol.ino
をオープンする。

この段階で、ほぼ準備はできているがもう一つやることがある。
このプロジェクトでは、アップロードのメソッドをコンパイル時に指定する必要があらしくデフォルトの設定ではコンパイルが失敗する。送信機からのアップロード用に設定されていて、環境を何かにあ焦る必要があるみたいだけど、それが不明というか調べてない。
で、何にする必要があるかというと、
Upload via Serial inc. Bootloader (FTDI)
を選択する。これで、コンパイルまでできる準備が完了したので、
検証コンパイル(丸のチェックボタンを押す)をやってみる。
すると何事もなくコンパイルが開始され、終了する
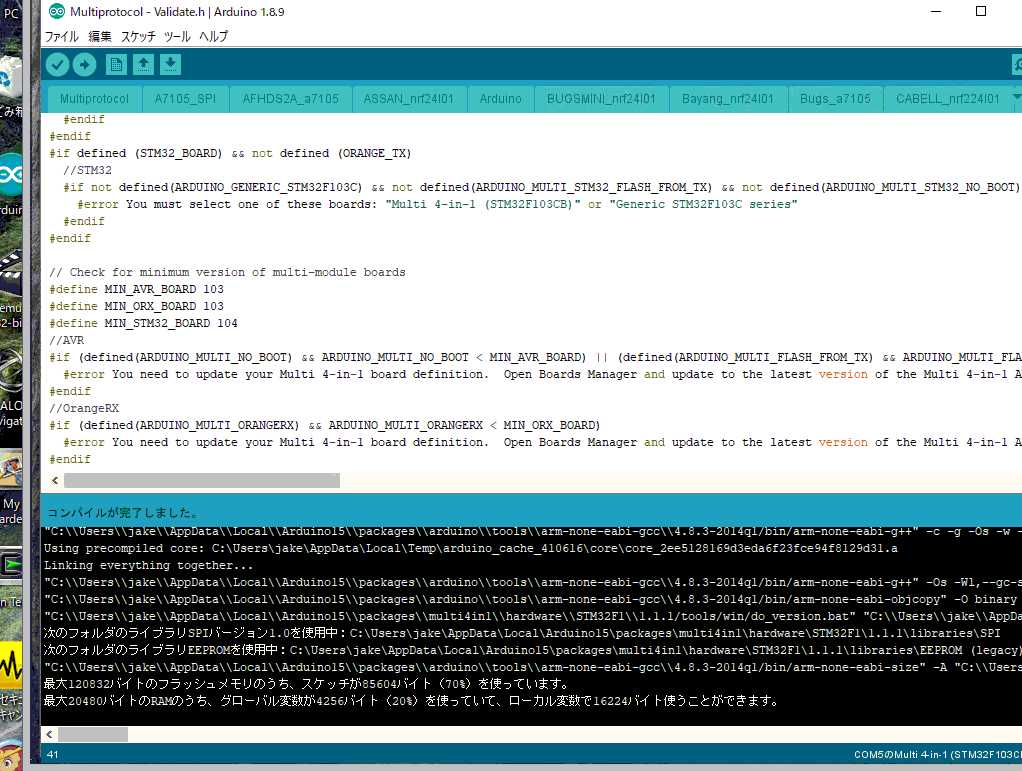
はず。
ここまできたら、Jp4In1をコンピュータに接続ずる。普通に売ってるUSB A->miniBのケーブルでいい。
Winodowsコントロールパネルのデバイスマネージャを開く。
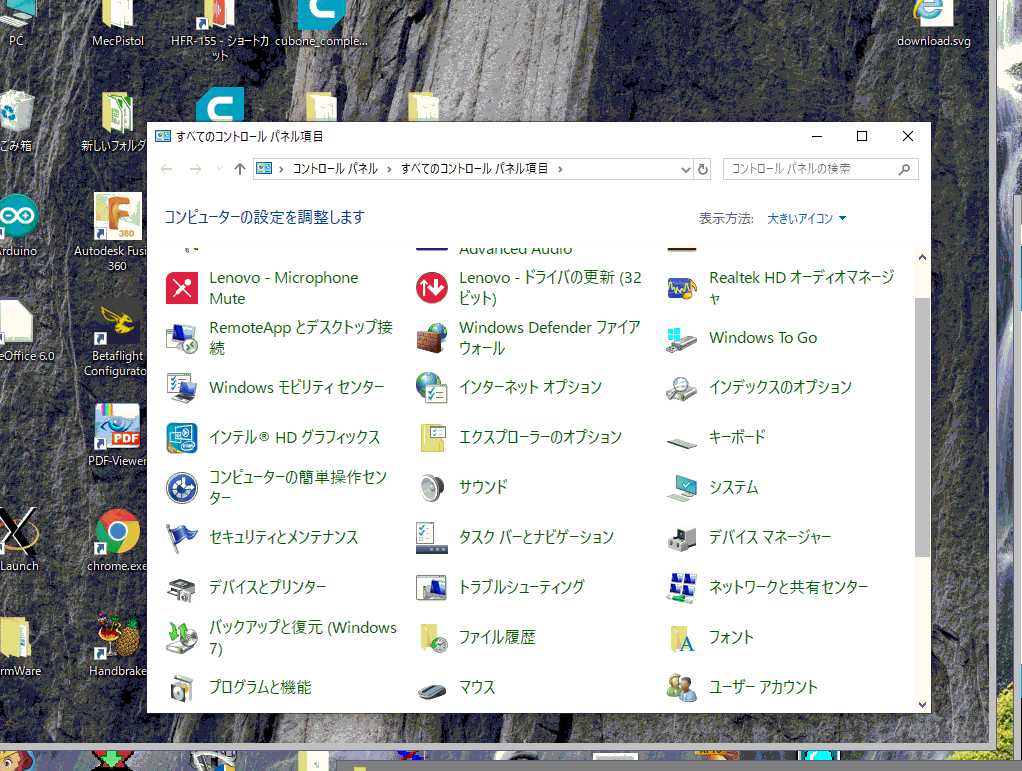
ちゃんとWinodws10でもあるので、Start->Windowsシステムメニュー→コントロールパネル→デバイスマネージャで起動した後、Jp4In1を接続する。すると、COMポートに新しくデバイスが追加される。
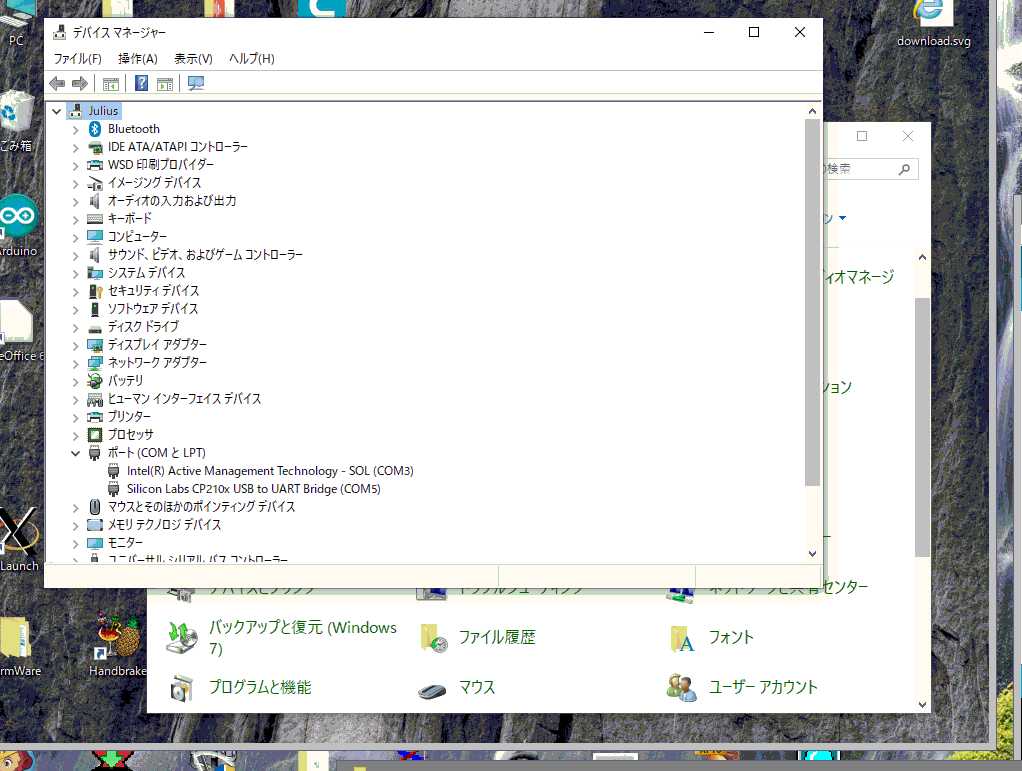
僕のでは、
”Silicon labs CP210x USB to UART Bridge"が”COM5"に接続されている様子がわかる。
このCOM5を記憶しておく。
ケーブル100均のやつでもいいじゃないかと思うけど、気になる人は高いのをどうぞ。それより、コンピュータ側のハードの側の状態のほうがどうも怪しい気がしていて、シリアルをつかった設定をするときは、マシンごとリセットをしたほうがいい感じがしている。特にノートパソコンは。現に書き込みに際して、うまく認識はするけど、書き込みはできないなんてときにそんな状態が起こっている感じがある。うまくいかなかったら、マシンのリセットをして、それでもだめならほかの手を打つほうがいいような感じがしている。
そしたら、Arduino IDEの”ツール”→”シリアルポート:COMxx*->からCOM5を選択する。
そこで、ファイルメニューの下の、右向き矢印ボタンをクリックすると、再度アップロード向けコンパイルが実施される。コンパイルなしで直接書く方法もあるんだろうけど、調べてない。コンパイルもそこそこかかるので、できれば飛ばしたい時もある。
このときは、コンパイルが終わると、自動的にアップロードも開始される。抜粋するけど、代替こんな感じ。
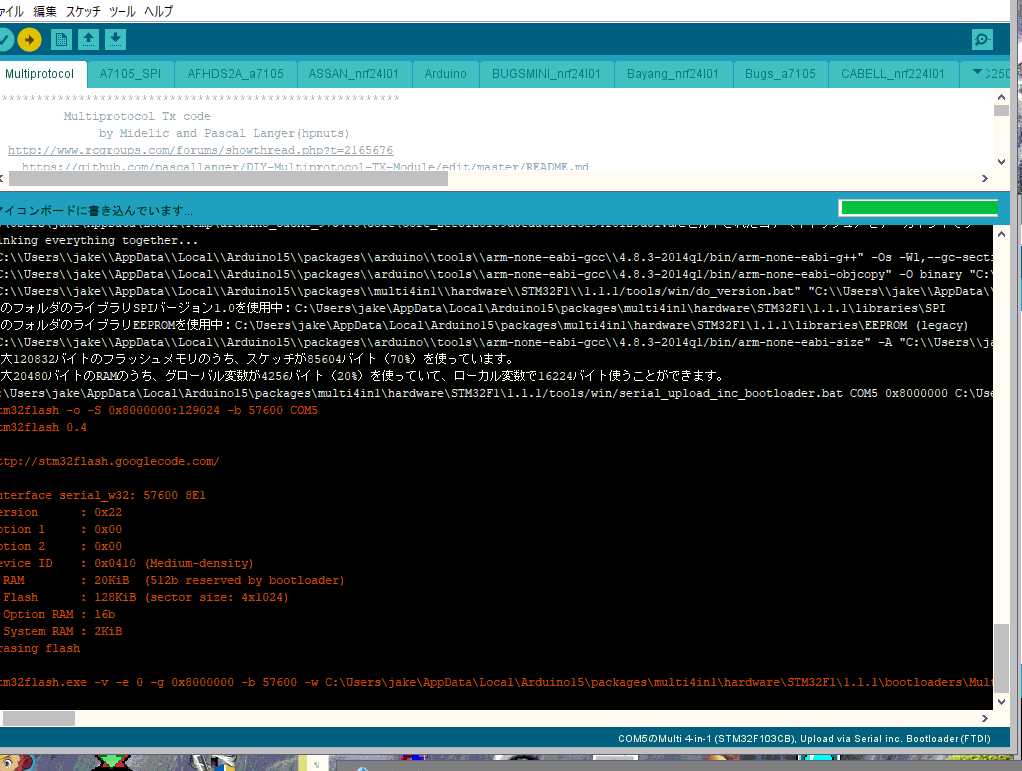
うまくアップロードまで終了すると、最後に
Wrote and verified address 0x08016e64 (100.00%) Done.
Starting execution at address 0x08002000... done.
と表示され、アップロードが完了し、新しいファームで、Jp4in1が動き出す。
まずはアップロードまで。
次回バインド編。
JP4in1 Firmware version UP! 概要 [ラジコン]
JP-4in1 は、買ったままだとPPMモードではつかえないらしい。
しかも、添付のマニュアルにも
due to the copyright of the protocol , JP4IN1 only provides hardware,please refer following link to download the firmware :
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module
”Jumperは、ハードウェアを提供しているだけで、ソフトウェアは、自分でダウンロードしてください
なんて書いてある。
このマルチプロトコル送信モジュールは、それこそ最初はArduinoかなんかで作り始めたらしく、かなりのバージョンが、存在しているみたいで、そもそもJumperのものも、CC(CreativeCommonsの略?)何とかって基板上に書いてあるから、オープンソースハードウェアなんではないかとおもわれる。JP4in1自体は、Jumperが、このオープンソースハードウェアをもとに改良してあるらしく、いわゆるUSBシリアル変換モジュール付きになっている。
Jp4in1のCPUはいわゆるArduinoのAVRではなく、STIのSTM32をつかっている。
使ったことないCPUなので、どうやってファームを書き込むかが不明だった。
いろいろこのページを見るとSTM32を使った場合nコンパイル方法が書いてあるページがあった。
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Compiling_STM32.md
このページの中に、
Arduinoをつかってコンパイルすること、
Arduinoをつかってコンパイルするためのツールスイートのダウンロード方法
ファームアップをするときの具体的な方法
が書いてある。
が、先ほども書いた通り、いろいろなバージョンについて書いてある必要があるので、特定の機種については、与えられた情報のなかから取捨選択していく必要がある。
で、JP4in1のファームをバージョンアップするためには、
1.必要なハードウェアは、USB A->miniBのケーブルを使用し、
2.ボード種別に *Multi 4-in-1 (STM32F103CB)"を選択し、
3.Upload method に”Upload via Serial inc. Bootloader(FTDI)*を選択し、
4.”検証・コンパイル”を実施した後、
5.”マイコンボードに書き込む”を実施することで行える。
ファームの書き換えは可能で、一度は書き込みに成功している。
とりあえず、ハードウェアの改造はせずともできるのではないかと思われる。
#わたしはピンヘッダつけたが、不要っぽい。
詳細については、後術する。
しかも、添付のマニュアルにも
due to the copyright of the protocol , JP4IN1 only provides hardware,please refer following link to download the firmware :
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module
”Jumperは、ハードウェアを提供しているだけで、ソフトウェアは、自分でダウンロードしてください
なんて書いてある。
このマルチプロトコル送信モジュールは、それこそ最初はArduinoかなんかで作り始めたらしく、かなりのバージョンが、存在しているみたいで、そもそもJumperのものも、CC(CreativeCommonsの略?)何とかって基板上に書いてあるから、オープンソースハードウェアなんではないかとおもわれる。JP4in1自体は、Jumperが、このオープンソースハードウェアをもとに改良してあるらしく、いわゆるUSBシリアル変換モジュール付きになっている。
Jp4in1のCPUはいわゆるArduinoのAVRではなく、STIのSTM32をつかっている。
使ったことないCPUなので、どうやってファームを書き込むかが不明だった。
いろいろこのページを見るとSTM32を使った場合nコンパイル方法が書いてあるページがあった。
https://github.com/pascallanger/DIY-Multiprotocol-TX-Module/blob/master/docs/Compiling_STM32.md
このページの中に、
Arduinoをつかってコンパイルすること、
Arduinoをつかってコンパイルするためのツールスイートのダウンロード方法
ファームアップをするときの具体的な方法
が書いてある。
が、先ほども書いた通り、いろいろなバージョンについて書いてある必要があるので、特定の機種については、与えられた情報のなかから取捨選択していく必要がある。
で、JP4in1のファームをバージョンアップするためには、
1.必要なハードウェアは、USB A->miniBのケーブルを使用し、
2.ボード種別に *Multi 4-in-1 (STM32F103CB)"を選択し、
3.Upload method に”Upload via Serial inc. Bootloader(FTDI)*を選択し、
4.”検証・コンパイル”を実施した後、
5.”マイコンボードに書き込む”を実施することで行える。
ファームの書き換えは可能で、一度は書き込みに成功している。
とりあえず、ハードウェアの改造はせずともできるのではないかと思われる。
#わたしはピンヘッダつけたが、不要っぽい。
詳細については、後術する。
2019-04-28 00:52
コメント(0)
Futaba 12ZA ! [ラジコン]
オークションでFutaba 12ZAというプロポをかった。2万円なので、高いとも言えないし、安いとも言えない。
そもそも中古だってことを考えるとちょっと高めかもしれない。


しかし、このプロポ、つかってみると、かなり優秀で、さすがに日本の超一流メイカーが作った準フラッグシップ機の使い勝手で、すごい。
すでに旧型となった、9Z(国内では、1024Zと呼ばれていた)プロポを使っているが、これでも何の不自由は、今のところ感じられなかったんだけど。
ラジコンの送信機のグレードは、ハードの信頼性もあるけど、ソフトウエアだと思う。9Zは、ものすごく個性的な作りになっていて、なかなかしびれるものがあったけど、今度の12Zもなかなかしびれる。
一番しびれたのは、チャネルごとの割り当てを自由に切り替えられることだ。
足しげく飛ばしに行ってた頃は、40Mhz、だの72Mhzだの周波数を使って、十数個のチャネルをみんなで分け合いながら使っていたが、2.4GHzの電波に代わって、お互い干渉することがなくなった。
ラジコンなので、送信機と受信機がお互い話をしながら飛ばすわけだけど、最近のドローンは中国製のものが多く、中国にあるメーカの受信機がデフォルトで埋め込まれているようになっており、この受信機と合わせるために、9Zと、この受信機に適合する送信モジュールを使って飛ばしていた。
ドローンのOSてきなソフトウェアにBetaFlightというのがあり、このOSで、FUTABAのプロトコルをしゃべれるように書き換えられた方がいらっしゃって、よっしゃそれならいけんのかと思い、
12Zを落として、いろいろ調べてみると、BetaFlightで対応しているFUTABAのプロトコルは、
S-HFSSというやつで、12Zではしゃべれないことが判明。
はてさてどうしたものか。
そもそも中古だってことを考えるとちょっと高めかもしれない。

しかし、このプロポ、つかってみると、かなり優秀で、さすがに日本の超一流メイカーが作った準フラッグシップ機の使い勝手で、すごい。
すでに旧型となった、9Z(国内では、1024Zと呼ばれていた)プロポを使っているが、これでも何の不自由は、今のところ感じられなかったんだけど。
ラジコンの送信機のグレードは、ハードの信頼性もあるけど、ソフトウエアだと思う。9Zは、ものすごく個性的な作りになっていて、なかなかしびれるものがあったけど、今度の12Zもなかなかしびれる。
一番しびれたのは、チャネルごとの割り当てを自由に切り替えられることだ。
足しげく飛ばしに行ってた頃は、40Mhz、だの72Mhzだの周波数を使って、十数個のチャネルをみんなで分け合いながら使っていたが、2.4GHzの電波に代わって、お互い干渉することがなくなった。
ラジコンなので、送信機と受信機がお互い話をしながら飛ばすわけだけど、最近のドローンは中国製のものが多く、中国にあるメーカの受信機がデフォルトで埋め込まれているようになっており、この受信機と合わせるために、9Zと、この受信機に適合する送信モジュールを使って飛ばしていた。
ドローンのOSてきなソフトウェアにBetaFlightというのがあり、このOSで、FUTABAのプロトコルをしゃべれるように書き換えられた方がいらっしゃって、よっしゃそれならいけんのかと思い、
12Zを落として、いろいろ調べてみると、BetaFlightで対応しているFUTABAのプロトコルは、
S-HFSSというやつで、12Zではしゃべれないことが判明。
はてさてどうしたものか。
トリガーセカンドステージ(撃発後) [APS]
トリガーゲージを作った時に、APで活躍しているJorker君とトリガープルについて話をしたことがあった。
撃発後のあと引きはあったほうがいいのかないほうがいいのか。
トリガーを引き始めほどなくすると撃発されるわけだが、そのあとのストロークを長くとるのがいいのか、全くなしにする(撃発後に、トリガーストップにあたる)、どっちがいいのかって話。
同じくAPでも活躍されている池上さんによると、あと引きナシは、100害あって1利なしという見解で、
おいらもそのように思ってた。引いている最中に壁に当たれば、トリガーを引いているトルクで銃を押すことになり、その結果、銃が回転を始める。回転すると、向きが変わるわけだから、あたんなくなるわな。ってんで、そうだと思ってた。
しかし、Jorkerは、”その考えもありそうだけど、APの機械式トリガーはなんかあと引きないんすよ。”と言っていて、意見が合わない。
というので、常用しているLE11にやってみることにした。
この絵だとLE17がそれっぽい。
プレートが難しくなりそうな気もするが。。。。
撃発後のあと引きはあったほうがいいのかないほうがいいのか。
トリガーを引き始めほどなくすると撃発されるわけだが、そのあとのストロークを長くとるのがいいのか、全くなしにする(撃発後に、トリガーストップにあたる)、どっちがいいのかって話。
同じくAPでも活躍されている池上さんによると、あと引きナシは、100害あって1利なしという見解で、
おいらもそのように思ってた。引いている最中に壁に当たれば、トリガーを引いているトルクで銃を押すことになり、その結果、銃が回転を始める。回転すると、向きが変わるわけだから、あたんなくなるわな。ってんで、そうだと思ってた。
しかし、Jorkerは、”その考えもありそうだけど、APの機械式トリガーはなんかあと引きないんすよ。”と言っていて、意見が合わない。
というので、常用しているLE11にやってみることにした。
この絵だとLE17がそれっぽい。
プレートが難しくなりそうな気もするが。。。。
JP4in1 MultiProtocol TX Module! [ラジコン]
12Zでは、うちのドローン君たちは使えないことが前回わかったわけで、
途方に暮れていたところに、駆け付けてくれたのが、”JP4in1"ということになるわけだ。

こ奴は、JRのモジュールの外形、インターフェースに準拠しているようで、JRのプロポだったら、そのままつかえるみたいだけど。。。。
12Zはフタバ製なので、明らかに使えない。
まずは乗っけるための側を制作。

これをつけると、JP4in1をマウントすることができて。。。。


途方に暮れていたところに、駆け付けてくれたのが、”JP4in1"ということになるわけだ。

こ奴は、JRのモジュールの外形、インターフェースに準拠しているようで、JRのプロポだったら、そのままつかえるみたいだけど。。。。
12Zはフタバ製なので、明らかに使えない。
まずは乗っけるための側を制作。

これをつけると、JP4in1をマウントすることができて。。。。


ハンバーガー [つれづれに]
人生で最初にたべたハンバーガーは、名駅地下のコンパルという店のテイクアウトだったとおもう。
当時、まだ、名古屋にはマクドナルドもまだなく、それをかって名鉄電車に乗って、食べながら犬山遊園に行ったことを覚えている。
今でもあるのかわからないけど、すごいうまかった記憶がある。
今日の昼飯は、コメダ珈琲の”カツパン”をいただいたが、コーヒーを飲みながらそんなことを思い出していた。
当時、まだ、名古屋にはマクドナルドもまだなく、それをかって名鉄電車に乗って、食べながら犬山遊園に行ったことを覚えている。
今でもあるのかわからないけど、すごいうまかった記憶がある。
今日の昼飯は、コメダ珈琲の”カツパン”をいただいたが、コーヒーを飲みながらそんなことを思い出していた。
DMMで。 [3D加工]
DMMでフロントサイトの造形をしようと思って登録しましたが、APS-3関連のものは、クリエーターズマーケットには登録できなくなったようです。
審査する人によるのかもしれませんが、作ったものが実銃に使用される場合を想定できるものは、一般発売はできないようにしている。これは、作った人のプロテクションも兼ねていると説明をいただきました。
現在までに登録されているものは問題ないようですが、新規出品登録は、できないというようなことになったようです。
自分用の造形は できる用ですが。
楽しみにしていたひと申し訳ありません。
#いるのかな。
審査する人によるのかもしれませんが、作ったものが実銃に使用される場合を想定できるものは、一般発売はできないようにしている。これは、作った人のプロテクションも兼ねていると説明をいただきました。
現在までに登録されているものは問題ないようですが、新規出品登録は、できないというようなことになったようです。
自分用の造形は できる用ですが。
楽しみにしていたひと申し訳ありません。
#いるのかな。
UR65とUK65 お出かけセット完成 [ドローン]
お出かけセットを作成した。
これで、箱一つで出撃できる。
UR65とUK65とFutaba9Zとゴーグル。
.jpg)
機体と電池とゴーグルは、ピカピカだけど、9Zはいささか古い。
だけど、13ポイントのスロットルカーブをつかってみたかった。
このプロポができたころには、ドローンなんてなくて、飛行機、グライダー、ヘリの3種類しか使えない。
ふつうドローンは、飛行機モードでつかうと思うんだけど、8CHしかない中で、1チャンネル捨てて、ヘリモードでやってみることにした。
スロットルカーブが使えれば、どっちでもいいんだけど、電池が、だんだん減るとパワーがなくなるから、これを補正したかったので、プログラムミックスが使いたかったので、いろんなパターンが使えるヘリモードで使うことにした。
いわゆるドローンモードは、スロットルスティックが中立のものが多いらしく、アーム(モータ起動)をするときに、スロットルレバーが一番下にしないと浮き上がらないようになってるらしいが、いきなり回りだそうなきがして怖い。
さらに、スロットルレバーと出力をいっぱい動かしてもあまり高度が変わらないようにしたいので、1番ポイントが0で、2番ポイントは56、あとは13まで順に70くらいまでのカーブをつくってみた。
スロットルを多少ラフに動かしても、あまり高度が変わらないから、ほぼ、ドローンモードみたいに使える。

リニアカーブ(リニアにしたら、カーブじゃないけど)レバーをごく少なく動かす練習が必要になるんだけど、そんなに細かい動きはおいらにはできない。
だから、機械に補正させることにした。
とりあえず。飛ばしやすくなったが、動きが渋いかな。もっとうまくなったら、順にダイナミックレンジを広げていくことにしよう。
新しいモード定義してもいいなあ。
これで、箱一つで出撃できる。
UR65とUK65とFutaba9Zとゴーグル。
.jpg)
機体と電池とゴーグルは、ピカピカだけど、9Zはいささか古い。
だけど、13ポイントのスロットルカーブをつかってみたかった。
このプロポができたころには、ドローンなんてなくて、飛行機、グライダー、ヘリの3種類しか使えない。
ふつうドローンは、飛行機モードでつかうと思うんだけど、8CHしかない中で、1チャンネル捨てて、ヘリモードでやってみることにした。
スロットルカーブが使えれば、どっちでもいいんだけど、電池が、だんだん減るとパワーがなくなるから、これを補正したかったので、プログラムミックスが使いたかったので、いろんなパターンが使えるヘリモードで使うことにした。
いわゆるドローンモードは、スロットルスティックが中立のものが多いらしく、アーム(モータ起動)をするときに、スロットルレバーが一番下にしないと浮き上がらないようになってるらしいが、いきなり回りだそうなきがして怖い。
さらに、スロットルレバーと出力をいっぱい動かしてもあまり高度が変わらないようにしたいので、1番ポイントが0で、2番ポイントは56、あとは13まで順に70くらいまでのカーブをつくってみた。
スロットルを多少ラフに動かしても、あまり高度が変わらないから、ほぼ、ドローンモードみたいに使える。
リニアカーブ(リニアにしたら、カーブじゃないけど)レバーをごく少なく動かす練習が必要になるんだけど、そんなに細かい動きはおいらにはできない。
だから、機械に補正させることにした。
とりあえず。飛ばしやすくなったが、動きが渋いかな。もっとうまくなったら、順にダイナミックレンジを広げていくことにしよう。
新しいモード定義してもいいなあ。
トリガーゲージ TG3 (その3) [DIY]
TG3のディスプレイは、160x128と前回のものより約4倍の情報量を誇る。といっても今どきのスマホの改造度は、2048x1280とかだったりするから、それに比べれば足元にも及ばないのはゆうに及ばず。
最も大きな違いは、情報量もそうだが、カラー表示になったことで、非常に見やすくなっている。
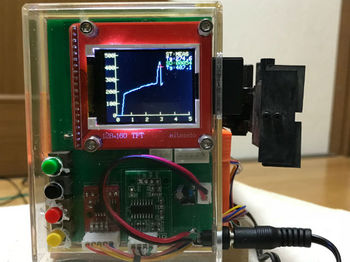
表示されている内容は、画面全体にグラフが表示され、右上に、現在の動作状態、計測中ポイントの荷重、SDカード上に主t力されているファイル番号、撃発時の荷重が表示される。
撃発時の荷重は、グラフ上で、赤のクロスカーソルで表示される。
TG3はSDカード上にデータを記録する。起動時にSDカードのチェックを行い、挿入されるまで起動しない。
計測したデータは、SDカード内のフォルダ、"data"フォルダにCSVファイルとして記録されており、計測の度に新しい番号を付与する。
なお、構造が簡単なため時計を持てないので、ファイル作成日付は入らない。
最も大きな違いは、情報量もそうだが、カラー表示になったことで、非常に見やすくなっている。
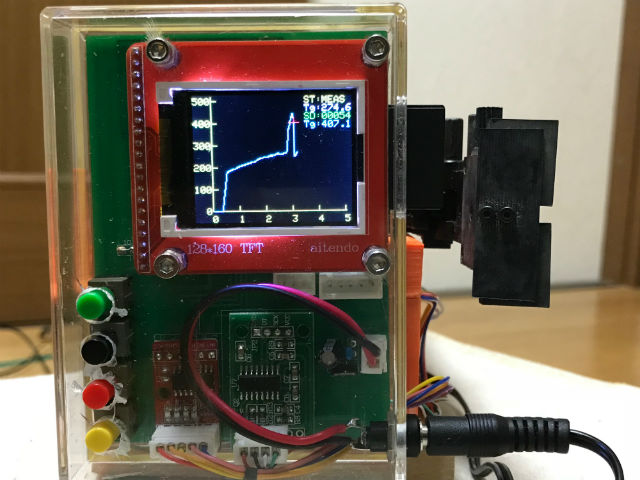
表示されている内容は、画面全体にグラフが表示され、右上に、現在の動作状態、計測中ポイントの荷重、SDカード上に主t力されているファイル番号、撃発時の荷重が表示される。
撃発時の荷重は、グラフ上で、赤のクロスカーソルで表示される。
TG3はSDカード上にデータを記録する。起動時にSDカードのチェックを行い、挿入されるまで起動しない。
計測したデータは、SDカード内のフォルダ、"data"フォルダにCSVファイルとして記録されており、計測の度に新しい番号を付与する。
なお、構造が簡単なため時計を持てないので、ファイル作成日付は入らない。
タグ:TG3 トリガー
トリガーゲージ TG3 (その2) [DIY]
TG3を作ろうと思ったきっかけは、この部品を見つけたから。

これはロードセルといって、金属のひずみを計測する部品で、金属のばね定数?をつかって荷重を測る装置。弾性変形中の金属しか測れないので、ある程度重さをかけると壊れちゃう。マージンがある程度あるがそれでも1.5倍くらい。しかも500gこれは、何かを連想させてしまう。
しかも500gを測るキッチンスケールは、1g単位で数字が出てくるぞ!ならこれでも行けるはずだ!
なんてのが発送の原点。
だがしかし、そうは問屋が卸さなかった。

これはロードセルといって、金属のひずみを計測する部品で、金属のばね定数?をつかって荷重を測る装置。弾性変形中の金属しか測れないので、ある程度重さをかけると壊れちゃう。マージンがある程度あるがそれでも1.5倍くらい。しかも500gこれは、何かを連想させてしまう。
しかも500gを測るキッチンスケールは、1g単位で数字が出てくるぞ!ならこれでも行けるはずだ!
なんてのが発送の原点。
だがしかし、そうは問屋が卸さなかった。
トリガーゲージ TG3 (その1) [DIY]
今回から何回かにわたって、TG3を特集する。
TG3は、トリガーの引いた距離とともにそのときの荷重を計測できる装置で、ミリより細かい単位で、荷重を計測できる。
前回に作成したトリガーゲージも計測というところ自体は同じようなものだが、今回は、荷重センサにロードセルを使用している。このため、より精度の高い計測が可能となり、10mg単位まで計測できる(しかし、制度的にはこの10倍の0.1g単位と思っている。)
TG3とトリガーゲージのSpecは以下の通りとなる。
となっている。
TG3は、トリガーの引いた距離とともにそのときの荷重を計測できる装置で、ミリより細かい単位で、荷重を計測できる。
前回に作成したトリガーゲージも計測というところ自体は同じようなものだが、今回は、荷重センサにロードセルを使用している。このため、より精度の高い計測が可能となり、10mg単位まで計測できる(しかし、制度的にはこの10倍の0.1g単位と思っている。)
TG3とトリガーゲージのSpecは以下の通りとなる。
| 機能 | トリガーゲージ | TG3 |
| 荷重センサ | 高分子フィルムの接触抵抗を圧力により変化させるタイプの圧力センサを用い、固定抵抗とこのセンサを電源に直列に接続することにより、圧力変化を電圧の変化として12bit計測 | ストレインゲージを用いたロードセルに対して、ホイートストンブリッジを用いて24bit計測 |
| ディスプレイ | 白黒STN液晶 128x64ピクセル | 1.8インチカラーTFT 160x128ピクセル 画面は小さいが情報量が多い |
| カーソル移動制御 | 28Byj-48ステップモータ ステップモータドライバ制御による1-2相制御 | 28Byj-48ステップモータ ダイレクトドライブによる2相制御 |
| カーソル保持 | 5φねじロッド 1軸6φ真鍮ロッドとブッシュ | 5φねじロッド 2軸6φ真鍮ロッドとリニアブッシュ |
| データ保持 | なし | SDカード 8G以下(多分) |
| 撃発検出 | 荷重が20g以上変化した場合 | 撃発音検出 APでも検出可能 |
| 対応銃 | APS-3 AP200 GP100 | APS-3 AP200 GP100 |
| お姿 | 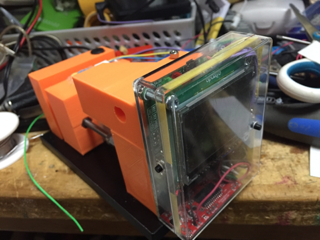 | 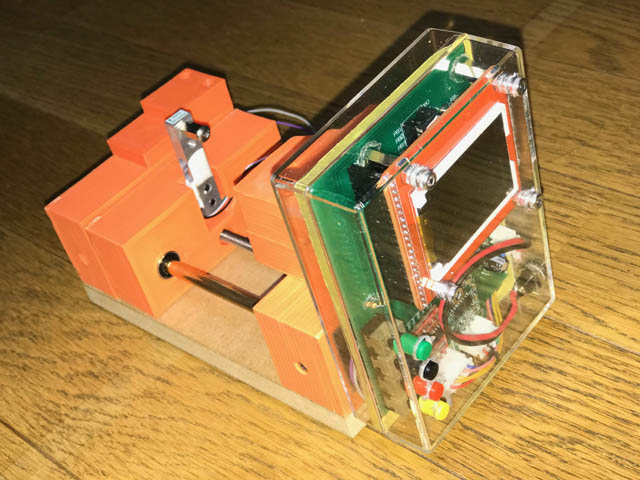 プロトタイプ |
となっている。
トリガーゲージ作成中! [APS]
トリガーゲージVer3を作っております。
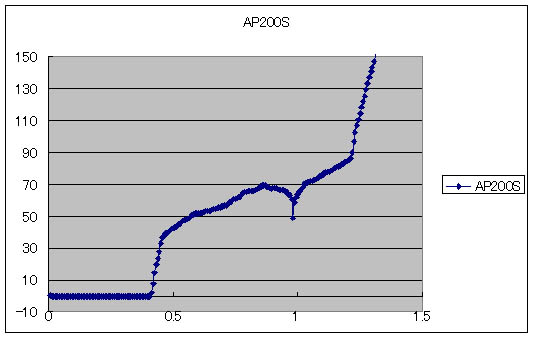
なんで作ろうかと思ったかというと、前の機械では取れなかったAP200Sのトリガー荷重をみたかったから。
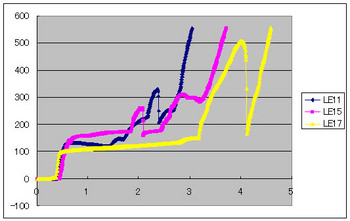
まずはAPS-3のLE達の競演
550gまでしかグラフがないのは、そこまでを荷重限界にしてるから。機械的にいうと壁にぶつかった状態。
どの銃もしっかりとしたファーストステージのあとに存在感のある本引きがあり、その後、ほとんど後引きがない。このあたりの作りこみはさすがXXさんだなあと思わせる(名前を入れたいけど、あえて伏字で)。
JORKERが言うにはAPの機械式トリガーのフィールに似てるそうな。
で、AP200Sのトリガー荷重
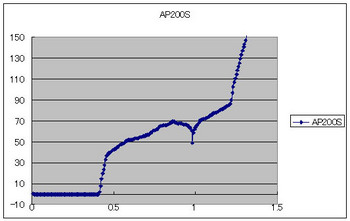
順調にファーストステージが伸びている中で、急に切れる感じが絵からは読める。
しかし撃ってみるとほんの少し兆しを感じる70g付近の小さい山のところなのかな。
で、どちらの銃も面白いのは、ピークを撃った後、0.015mmぐらい進んだ後で、切れること。
APのほうはこの落ち始めを感じてるのかもしれない。
機械のはもう少し手いれるから、それから、紹介するかな。
今度のはいいよー
なんで作ろうかと思ったかというと、前の機械では取れなかったAP200Sのトリガー荷重をみたかったから。
まずはAPS-3のLE達の競演
550gまでしかグラフがないのは、そこまでを荷重限界にしてるから。機械的にいうと壁にぶつかった状態。
どの銃もしっかりとしたファーストステージのあとに存在感のある本引きがあり、その後、ほとんど後引きがない。このあたりの作りこみはさすがXXさんだなあと思わせる(名前を入れたいけど、あえて伏字で)。
JORKERが言うにはAPの機械式トリガーのフィールに似てるそうな。
で、AP200Sのトリガー荷重
順調にファーストステージが伸びている中で、急に切れる感じが絵からは読める。
しかし撃ってみるとほんの少し兆しを感じる70g付近の小さい山のところなのかな。
で、どちらの銃も面白いのは、ピークを撃った後、0.015mmぐらい進んだ後で、切れること。
APのほうはこの落ち始めを感じてるのかもしれない。
機械のはもう少し手いれるから、それから、紹介するかな。
今度のはいいよー
ひだりきき? [?]
おいらは、右利きだと信じている。
だから、おいらは、未知の左側を歩きたがる傾向がある。
でも、トンカチをもつと左のほうが得意だし、左脳が得意なはずの計算もできない。
日本車は、右側にウィンカーがある(だいたい)。外車は左側がウィンカーがある場合が多い。
右ハンドルに転用してもハンドルアッシーはそのままのが多いためか、右ハンドルなのに、左側にある。
これは、中心選から回るってことなのかもしれないけど、外国は左利きが多いのかって。
でも鉄砲のグリップは右利き用が圧倒的に多いし、競技中なんて右利き専用みたいなもん。
だとするとやっぱり、車のウィンカーは中心線に寄せてあるみたいだけど、右にある方が
割と動かすウィンカーは、いい感じが気がする。
だから、おいらは、未知の左側を歩きたがる傾向がある。
でも、トンカチをもつと左のほうが得意だし、左脳が得意なはずの計算もできない。
日本車は、右側にウィンカーがある(だいたい)。外車は左側がウィンカーがある場合が多い。
右ハンドルに転用してもハンドルアッシーはそのままのが多いためか、右ハンドルなのに、左側にある。
これは、中心選から回るってことなのかもしれないけど、外国は左利きが多いのかって。
でも鉄砲のグリップは右利き用が圧倒的に多いし、競技中なんて右利き専用みたいなもん。
だとするとやっぱり、車のウィンカーは中心線に寄せてあるみたいだけど、右にある方が
割と動かすウィンカーは、いい感じが気がする。
バリアブルリアサイト [APS]
DMMで出品させてもらってるバリアブルリアサイトですが、構造的に問題がありそうなので、
現在新規の受注は見合わせております。
といっても、あまり動かない消費なので、問題ないとおもいますが。
現在新規の受注は見合わせております。
といっても、あまり動かない消費なので、問題ないとおもいますが。
正確に的中させるために [APS]
小さなまとに正確に当てるために必要なことは、
大まかにいうと、
1.精密に狙う
2.精密に撃つ
の2点になるとおもう。
精密に狙うための方法は、据銃能力だと思われるけど、それにはグリップの握り方とか、いろいろな問題があるとおもうけど、今回は触れない。ってか私にはわからない。
精密に撃つと書けばひとことかもしれないけど、精密に狙った後で、トリガーを引いて、弾がバレルを抜け出るまで保持していないといけない。BB弾は弾速が遅いので、時間がかかる。十分な時間を動かないで保持していないと、バレルに接触し、望まないホップがかかり、あらぬ方向に飛んで行ってしまう。
この動画は、ある選手のブルズアイの時のものだが、音がしてから銃がほとんどぶれていない。
フォロースルーが大事なのは、このためだが、実は、トリガーの指自体も気を付けないといけない。
指の第一関節より先の質量も思ったより軽くない。運動エネルギーは、速度の2条かける質量の2分の一で、そのエネルギーをトリガーストップにぶつけてしまうと銃が動いてしまう。
そこでトリガーの軽さに注目する。
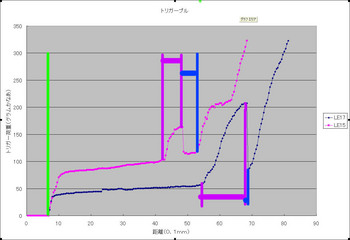
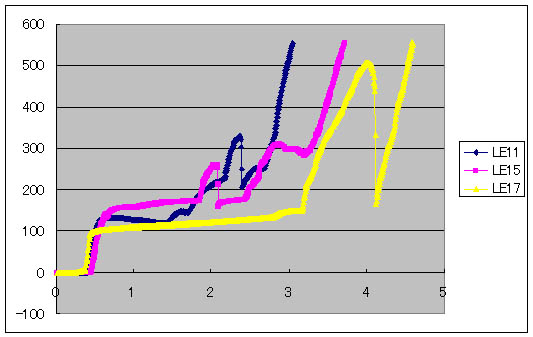
このグラフは、以前も掲載したLE15とLE17のトリガーブルの重さと引いた距離のグラフである。
さらに、前引き、本引き、後引きをわかりやすいように色付けしてみた。黄緑は前引き、紫を本引き、青を後引きとしてみた。
トリガープルの重さは、LE15のほうが重たいが、後引きはLE17のほうが少ない。どちらのLEも最終段階で、人手による調整が入っているようなので、個体差もたぶんあるのだろうが、LE17 の後引きがほとんどない。
この調整結果を意図的に作り出したのかはよくわからないが、LE17のほうは、エアピストルの雰囲気に近づけるようにとの意向があったようなので、重めの味付けになっている。たぶん後引き量は、考慮に入れてなかったのではないかと思う。
ここで、話を指先の運動エネルギー量に戻そう。トリガーをきれいに落とすためには、ほとんど指が動かない状態であることが望ましいし、落ちる瞬間のエネルギーベクトルがトリガーの運動方向になるべく一致していれば、銃は動かない。
トリガーを“エイっ!”って引いてしまうと、どうしても速度がついてしまう。速度が付くと、今度は止めないといけない。最初は、この速度を緩和するために”後引き”が必要になると考えていたが、どうもそんなに、簡単な話ではないような気がしている。
基本は、トリガーが落ちたら、指は動かす必要がない。しかし、トリガーが落ちた後には、急に軽くなるポケットが存在する。今まで、100gで引いていたのが、急に0gになる(正確には、もっとあると思うけど)100gでトリガーを落とすために持っていたエネルギーは、そのまま、無抵抗になった瞬間に指を動かす。青引きが1mとかあればその中で、ゆびを止めることが可能であるかもしれない。しかし、それほど距離はないかもしれないが、指は第2関節から回転運動を始めている。きっちり合わせたトリガー一であれば、第三象限を第4象限に向かってゆびが回転運動している。すると銃は右まわりの回転を始めるはずだ。このとき、先ほどのエネルギーは、バレル方向と横方向に分解され、横方向に分解されたエネルギーは銃を右に動かす。支持位置は普通グリップなので、グリップより前の位置で右方向の力がかかれば、右に飛んでくことになる。
なので、トリガー撃発直後からゆびは動かない/動かさないほうがいい。
だとすると、後引きが無い方が、いいかもしれないし、APの世界では後引きを殺している場合が多いそうだ。
指の可動域を、トリガーが落ちる前後の少しあいだだけ動くようにする方がいい。
この点を考えると、LE17は重たいけれど、本引きがしっかりあり、最後の落ちる瞬間を正確に把握できれば、後引きがほとんどないので、指を動かさないことができる。もっともひきが強ければトリガーストップに当たった後、トリガーストップ事態を押すので、意味がないが、この動きを精密にコントロールできれば、重さは実は関係ないのかもしれない。
私個人的には、まだまだへたくそなので、トリガーが適度に軽い方がよく後引きがあった方がコントr-るしやすい。
しかし、このグラフをみるとLE15はよくできたトリガーだ。すぐ使えなくなるようなので、実にもったいない。
なお、これは個人のいけんであり、すべての人に当てはまるかどうかはわかりません。
大まかにいうと、
1.精密に狙う
2.精密に撃つ
の2点になるとおもう。
精密に狙うための方法は、据銃能力だと思われるけど、それにはグリップの握り方とか、いろいろな問題があるとおもうけど、今回は触れない。ってか私にはわからない。
精密に撃つと書けばひとことかもしれないけど、精密に狙った後で、トリガーを引いて、弾がバレルを抜け出るまで保持していないといけない。BB弾は弾速が遅いので、時間がかかる。十分な時間を動かないで保持していないと、バレルに接触し、望まないホップがかかり、あらぬ方向に飛んで行ってしまう。
この動画は、ある選手のブルズアイの時のものだが、音がしてから銃がほとんどぶれていない。
フォロースルーが大事なのは、このためだが、実は、トリガーの指自体も気を付けないといけない。
指の第一関節より先の質量も思ったより軽くない。運動エネルギーは、速度の2条かける質量の2分の一で、そのエネルギーをトリガーストップにぶつけてしまうと銃が動いてしまう。
そこでトリガーの軽さに注目する。

このグラフは、以前も掲載したLE15とLE17のトリガーブルの重さと引いた距離のグラフである。
さらに、前引き、本引き、後引きをわかりやすいように色付けしてみた。黄緑は前引き、紫を本引き、青を後引きとしてみた。
トリガープルの重さは、LE15のほうが重たいが、後引きはLE17のほうが少ない。どちらのLEも最終段階で、人手による調整が入っているようなので、個体差もたぶんあるのだろうが、LE17 の後引きがほとんどない。
この調整結果を意図的に作り出したのかはよくわからないが、LE17のほうは、エアピストルの雰囲気に近づけるようにとの意向があったようなので、重めの味付けになっている。たぶん後引き量は、考慮に入れてなかったのではないかと思う。
ここで、話を指先の運動エネルギー量に戻そう。トリガーをきれいに落とすためには、ほとんど指が動かない状態であることが望ましいし、落ちる瞬間のエネルギーベクトルがトリガーの運動方向になるべく一致していれば、銃は動かない。
トリガーを“エイっ!”って引いてしまうと、どうしても速度がついてしまう。速度が付くと、今度は止めないといけない。最初は、この速度を緩和するために”後引き”が必要になると考えていたが、どうもそんなに、簡単な話ではないような気がしている。
基本は、トリガーが落ちたら、指は動かす必要がない。しかし、トリガーが落ちた後には、急に軽くなるポケットが存在する。今まで、100gで引いていたのが、急に0gになる(正確には、もっとあると思うけど)100gでトリガーを落とすために持っていたエネルギーは、そのまま、無抵抗になった瞬間に指を動かす。青引きが1mとかあればその中で、ゆびを止めることが可能であるかもしれない。しかし、それほど距離はないかもしれないが、指は第2関節から回転運動を始めている。きっちり合わせたトリガー一であれば、第三象限を第4象限に向かってゆびが回転運動している。すると銃は右まわりの回転を始めるはずだ。このとき、先ほどのエネルギーは、バレル方向と横方向に分解され、横方向に分解されたエネルギーは銃を右に動かす。支持位置は普通グリップなので、グリップより前の位置で右方向の力がかかれば、右に飛んでくことになる。
なので、トリガー撃発直後からゆびは動かない/動かさないほうがいい。
だとすると、後引きが無い方が、いいかもしれないし、APの世界では後引きを殺している場合が多いそうだ。
指の可動域を、トリガーが落ちる前後の少しあいだだけ動くようにする方がいい。
この点を考えると、LE17は重たいけれど、本引きがしっかりあり、最後の落ちる瞬間を正確に把握できれば、後引きがほとんどないので、指を動かさないことができる。もっともひきが強ければトリガーストップに当たった後、トリガーストップ事態を押すので、意味がないが、この動きを精密にコントロールできれば、重さは実は関係ないのかもしれない。
私個人的には、まだまだへたくそなので、トリガーが適度に軽い方がよく後引きがあった方がコントr-るしやすい。
しかし、このグラフをみるとLE15はよくできたトリガーだ。すぐ使えなくなるようなので、実にもったいない。
なお、これは個人のいけんであり、すべての人に当てはまるかどうかはわかりません。
こんげつは記事を書いてない。 [うだうだ]
ごめんなさい。今月の記事はこれだけかもしれません。
が、近いうちにドカンと載せられたらいいなあと思っております。
思ってるだけなので、なにも起こらないこともあり。
が、近いうちにドカンと載せられたらいいなあと思っております。
思ってるだけなので、なにも起こらないこともあり。
プレートの撃ち方 [APS]
最近は、右から撃つようにしている。
精密に射撃するとき、なるべく揺れないほうがいいわけで、そういう意味で左右方向の揺れを低減できるインラインは理に適っている。なので、すべての的に対してインラインで撃つためには、射撃事に移動が必要になる。昔は、このように移動しながら撃っていたけど、再現性の悪さが気になる。
左側にはオープンとなるが、右側は、きつくなるので、インラインより右側で撃つのは、問題がありそうだ(さらにきっちり体をロックできるらしいが、おいらはぎゃくにゆれる)。そこで、一番右の的でサイト合わせをした後、左のまとから撃っていた。
左側のまとは、オープン気味になるが、プレートは速射系の競技であるので、それも良しとするが、”最初の的に向かって一度だけサイトsチェックをしてください”の部分に引っかかる。サイトチェックは5枚目だから。
今まで、ずっと左側から撃っていたので、その通りでやっていたが、ちょっと気が引けていた。
本線以降は、右から撃つようにしている。行ってみればそれだけなんだけど。
精密に射撃するとき、なるべく揺れないほうがいいわけで、そういう意味で左右方向の揺れを低減できるインラインは理に適っている。なので、すべての的に対してインラインで撃つためには、射撃事に移動が必要になる。昔は、このように移動しながら撃っていたけど、再現性の悪さが気になる。
左側にはオープンとなるが、右側は、きつくなるので、インラインより右側で撃つのは、問題がありそうだ(さらにきっちり体をロックできるらしいが、おいらはぎゃくにゆれる)。そこで、一番右の的でサイト合わせをした後、左のまとから撃っていた。
左側のまとは、オープン気味になるが、プレートは速射系の競技であるので、それも良しとするが、”最初の的に向かって一度だけサイトsチェックをしてください”の部分に引っかかる。サイトチェックは5枚目だから。
今まで、ずっと左側から撃っていたので、その通りでやっていたが、ちょっと気が引けていた。
本線以降は、右から撃つようにしている。行ってみればそれだけなんだけど。



