バリアブルリアサイト発注。 [APS]
APS関連の記事を久しぶりに書こうと思う。SpotMicroがここのところ上がってこないのは、ソフトウェアを開発中なんだけど、あまり進捗内からで、やめたわけじゃないよ。
で、バリアブルリアサイトをDMMに発注しました。もちろん私用。だれからも作ってほしいなんて話は聞かないし。
なぜ、注文したかというと、APS-3のフロンティアモデルを買うから。
私の鉄砲の特徴である、ちょっと伸びてるバレルカバーをどうするか問題は、いったんおいといて、リアサイトとフロントサイトを変える。後、グリップと。
明日、エニスヘいって。レンズホルダもかわないといけない。
ターンバックルがちょっと憂鬱。
で、バリアブルリアサイトをDMMに発注しました。もちろん私用。だれからも作ってほしいなんて話は聞かないし。
なぜ、注文したかというと、APS-3のフロンティアモデルを買うから。
私の鉄砲の特徴である、ちょっと伸びてるバレルカバーをどうするか問題は、いったんおいといて、リアサイトとフロントサイトを変える。後、グリップと。
明日、エニスヘいって。レンズホルダもかわないといけない。
ターンバックルがちょっと憂鬱。
タグ:APS-3
キーボード変換装置 [Arduino]
ちょっと感動。
普段Perixxの英語キーボードを使っているんだけど、
このキーボードはビッグフットなんだけど、メカニカルっぽいキーボードで、打鍵時の反発力とかがいい感じなのと、何しろ安いのが気に入ってる。(これが壊れた時に買い替えられるのかが不安だけど)
ちなみにドイツ製らしい。Made in Chinaなんだけど。
Windowsの入力デバイスに、英語キーボードに設定すると、何も
問題なく使えるんだけど、この設定で、リモートデスクトップを使う場合に、接続したWindowsのデフォルトキーボードが日本語の時とかに、’¥’とか ’|’とかが入力できなくなることがある。’¥’は、ディレクトリの区切り文字なので、とっても困ることがある。
そのためだけにキーボードを付け替えるのも嫌なので、いろいろ検索していると、
なんとUSB2USBとして、変換装置を公開してくれているkirin3722さんのブログが見つかった。
USB2USB Bootkeyboard
今まで、JoyStickを作ろうとして、ProMicroを使ったHIDデバイスの作成はなんとなくわかっていたdけど、なるほど、こうすれば、いけるかもしれない。ということで、
作ってみた。

必要な部品は、ProMicroの3.3Vのものと、miniUSB HOSTシールドの2個と、あとちょっとの線。
必要な作成方法は、kirin3722さんのページにもある、東京お天気カメラさんの
普段Perixxの英語キーボードを使っているんだけど、
このキーボードはビッグフットなんだけど、メカニカルっぽいキーボードで、打鍵時の反発力とかがいい感じなのと、何しろ安いのが気に入ってる。(これが壊れた時に買い替えられるのかが不安だけど)
ちなみにドイツ製らしい。Made in Chinaなんだけど。
Windowsの入力デバイスに、英語キーボードに設定すると、何も
問題なく使えるんだけど、この設定で、リモートデスクトップを使う場合に、接続したWindowsのデフォルトキーボードが日本語の時とかに、’¥’とか ’|’とかが入力できなくなることがある。’¥’は、ディレクトリの区切り文字なので、とっても困ることがある。
そのためだけにキーボードを付け替えるのも嫌なので、いろいろ検索していると、
なんとUSB2USBとして、変換装置を公開してくれているkirin3722さんのブログが見つかった。
USB2USB Bootkeyboard
今まで、JoyStickを作ろうとして、ProMicroを使ったHIDデバイスの作成はなんとなくわかっていたdけど、なるほど、こうすれば、いけるかもしれない。ということで、
作ってみた。
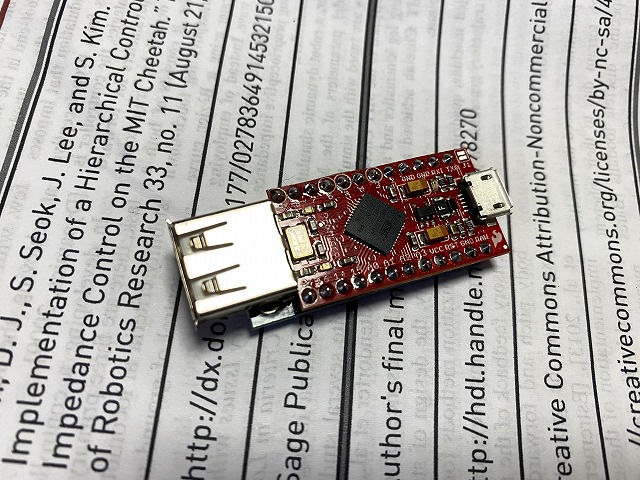
必要な部品は、ProMicroの3.3Vのものと、miniUSB HOSTシールドの2個と、あとちょっとの線。
必要な作成方法は、kirin3722さんのページにもある、東京お天気カメラさんの
SpotMicro(mini) その29 ー現時点での到達点 ー [ROBOT]
機体で残っているのは、
Spot制御プログラム
このプログラムはROSベースであはあるものの、誰かが作ったプログラムはなるべく使わないという方針でスクラッチから書き下ろしているわけだが、i2cpwmboard関連は除いて。
Iphone コマンダー
なんといっても、画像が出力されているまではできているので、ほぼ完成なんだけど、
まだまだやらないといけないな。
| 1 | 左右のTOFセンサからの測定値読み込みがまだできてない。同じI2Cにつながっていて、センサのアドレスも変更できない。このセンサを使用例があまりに少ないので、ちょっと萎えている。でもちゃんと売られているので、使えるはずで、それをコントロールする方法を探し中。また、I2CなのにCSがあるので、それで右と左を制御できる。だいぶパンチを食らって放ってある。 |
| 2 | ジャイロセンサからの入力が取り込めてない。9軸のセンサはついていて、いつでもかけるからいいやっていうので、放ってある。 |
| 3 | 電池残量を図る機構は組み込んであり、Pythonでの取得は確認済みであるが、まだROSに取り込んでないので、その部分を作成する必要がある |
Spot制御プログラム
このプログラムはROSベースであはあるものの、誰かが作ったプログラムはなるべく使わないという方針でスクラッチから書き下ろしているわけだが、i2cpwmboard関連は除いて。
| 1 | どのノードで、どのトピックを扱うかを考えないといけない。 |
| 2 | 動作状態(歩行等)の遷移とイベントの確認 |
| 3 | gyroからの入力による姿勢の制御 |
| 4 | カメラ画像からの自己位置推定(別ノードかも) |
Iphone コマンダー
なんといっても、画像が出力されているまではできているので、ほぼ完成なんだけど、
| 1 | 機体から出力される(はずの)Gyro情報のHUD化 |
| 2 | 機体の電池残量表示 |
| 3 | その他機体の状態表示機能追加 |
まだまだやらないといけないな。



