SpotMicro(mini) その26 ーリモコン そうだIphoneを使おう (その2)ー [ROBOT]
Pythonistaを用いたROSでの発信(トピックのパブリッシュ)はできたけど、サブスクライブができないのは、前言ったとおりだ。
すべてがROSの世界で実現できるとすると、こんな感じを予定してた。
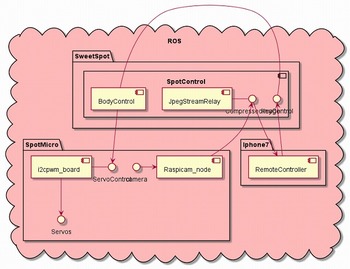
が、実際にやってみるとできなかったわけである。この絵でいうところのIPhoneで、CompressedImage
を使うところがうまくいけないわけだ。
そこで、どうするかを考えた。
1番2番の方法は、世の中的にも紹介している人があまりいないので、できれば、すごく有名になれるチャンスかもしれないが、逆に言うと、IPHONEをROSの端末として使うことはあまり需要がないのかもしれない。あと、私は、IPhoneしか持ってないので、エディタの字が小さくなってきてちょっと厳しい。
ので、正攻法?とでもいえる3番を使うことにした。
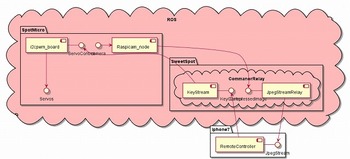
とすると、上記の図は、以下のように変更する。
カメラ画像はいわゆる動画ではないが、JPEG画像が連続して飛んでくる来るわけで、とても忙しい処理をしないといけない。Pythonは、インタプリタ言語であるので、普通のコンパイラ言語よりは遅い。
処理的に間に合うかが問題となりそう。
とりあえず、連続する画像をしばらく見ることはできた。
すべてがROSの世界で実現できるとすると、こんな感じを予定してた。

が、実際にやってみるとできなかったわけである。この絵でいうところのIPhoneで、CompressedImage
を使うところがうまくいけないわけだ。
そこで、どうするかを考えた。
| 1 | PythonistaのROSの環境の動かない理由を探索して、修正して動くようにする。 |
| 2 | ROSをpyto上のインストールして、使えるようにする。 |
| 3 | SpotMicroから出力されるJpegイメージをいったん別のノードで受けて、それをROSではない普通のソケットストリームに変換して、IPhone上のPythonista で受信する。 |
1番2番の方法は、世の中的にも紹介している人があまりいないので、できれば、すごく有名になれるチャンスかもしれないが、逆に言うと、IPHONEをROSの端末として使うことはあまり需要がないのかもしれない。あと、私は、IPhoneしか持ってないので、エディタの字が小さくなってきてちょっと厳しい。
ので、正攻法?とでもいえる3番を使うことにした。
とすると、上記の図は、以下のように変更する。

カメラ画像はいわゆる動画ではないが、JPEG画像が連続して飛んでくる来るわけで、とても忙しい処理をしないといけない。Pythonは、インタプリタ言語であるので、普通のコンパイラ言語よりは遅い。
処理的に間に合うかが問題となりそう。
とりあえず、連続する画像をしばらく見ることはできた。



