SpotMicro(mini) その15 ー4足歩行パターン..その2 [ROBOT]
前回の記事で静歩行の1サイクルの75%を設置するようにするには、9ステップの接地と上昇、移動、下降の3ステップで、12ステップが最低必要なことが分かった。
このデューティでやるとすると、上昇、移動、下降がそれぞれ1/12サイクルで実施しないといけない。
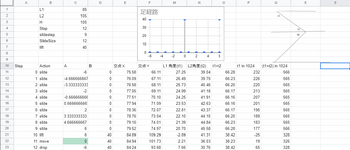
足の経路と、サーボによる起動を計算するためにスプレッドシートで計算してみた。
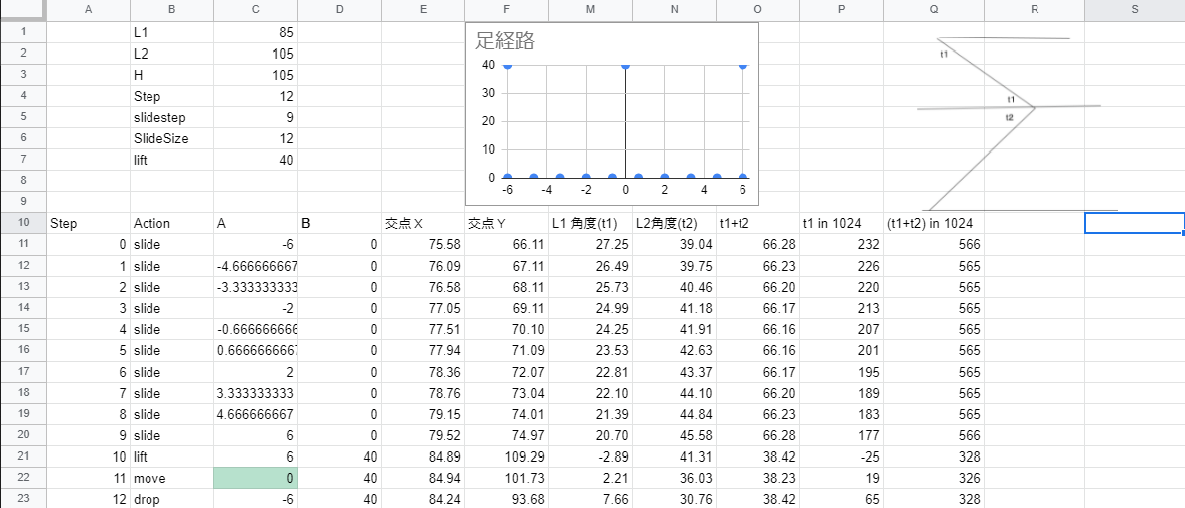
B列がパラメータの列で、L1がひざ上の長さ、L2はひざ下の長さ、として、足の付け根から地面まdでの高さがH、Stepがサイクルのステップ、SlideSizeが着地地点のXの移動量、Liftが足の持ち上げ距離
として、この時、ステップごとの足先の位置の座標をA、Bとして、足経路を決定したのが、図中央上の足経路になるとなる。
これを右図のように角度を仮に決めて計算すると、t1、t2として角度が計算できる。
このデューティでやるとすると、上昇、移動、下降がそれぞれ1/12サイクルで実施しないといけない。
足の経路と、サーボによる起動を計算するためにスプレッドシートで計算してみた。
B列がパラメータの列で、L1がひざ上の長さ、L2はひざ下の長さ、として、足の付け根から地面まdでの高さがH、Stepがサイクルのステップ、SlideSizeが着地地点のXの移動量、Liftが足の持ち上げ距離
として、この時、ステップごとの足先の位置の座標をA、Bとして、足経路を決定したのが、図中央上の足経路になるとなる。
これを右図のように角度を仮に決めて計算すると、t1、t2として角度が計算できる。




コメント 0