この広告は前回の更新から一定期間経過したブログに表示されています。更新すると自動で解除されます。
SpotMicro(mini) その14 ー4足歩行パターンー [ROBOT]
静歩行について1サイクルにおいて75%を着地することにすれば、4本ある足のどれかの3本が着地する歩行が可能なわけだ。
そこで、どのようなパターンになるかを考えてみた。
ここでは75%をいったん忘れて考えてみることにした。
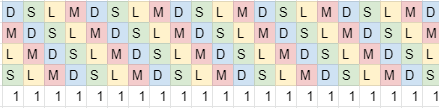
下に示す表(図?)は、1サイクルにおける動作を、着地しながら移動するスライド(S)、地面から足を話すリフト(L)、空中で前に足を動かすムーブ(M)、足を下すドロップ(D)としてあらわしてみた。
このパターンは、上記の4つの動作を均等に作業するきわめて効率がいいパターンで、最後の行は、ちそのフェーズにおいて着地しているSの数を示している。
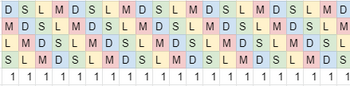
このパターンは、4つの動作を均等に割り振っており、1サイクル中のSのデュレーションは25%であるので、ほとんどの期間で、どれか1本しか着地していない。
ちなみに、実際のわんこはこの歩き方をしない。が、1本でも着地していれば、次の着地する脚の力加減で、姿勢を維持することができる。
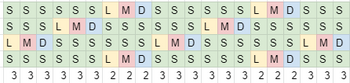
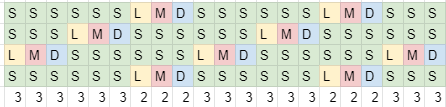
このパターンは、接地している区間が他の区間の合計に対して2倍になっている。
すべての期間において2本接地しているが、これでも次の時間帯を考慮しないと倒れてしまう。
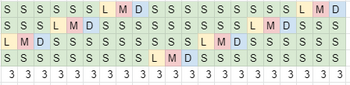
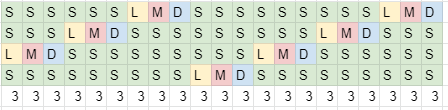
このパターンは、接地している時間が、他の区間の合計の3倍としており、このため、常に3本の足が接地している。
SLMDの順序は、静方向においては、必ず一緒になるので、ほかの順序の組み合わせは見なくてもいいが、3本を接地させるためには、25%の時間で、75%の作業をしなければいけない理由がわかってもらえたと思う。
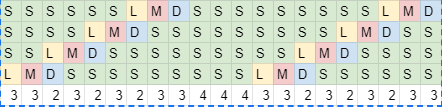
ただいろいろやっている中で面白いのを見つけた。
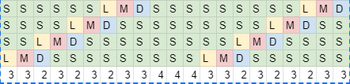
この例はステップで気には、先ほどの75%のものと」同じであるが、位相をちょっと変えてある。
今回の動作の目標は、必ず3本以上の足が接地地している状態を目指しているが、3本ではなく2本のところもある。しかもよく見ると4本接地しているところもある。
4本の間に姿勢を立て直せれば、早い時間に2本脚の区間を通り過ぎれば、実は、これでも行けるかもしれない。(この2本の不安定区間を時間軸でどうにかしようっていうのは、実は動歩行なんだけど)
動歩行への挑戦は、ちょっと先延ばしにするのが、先ほどの2本だけずっと着地しているバターンも動歩行(普通に歩いてるときはこれ)だし、全力疾走中のわんこは、4本をほぼ同時に着地して4本足で地面をけって加速し、次の瞬間すべての足が地面から離れている。
本物のスポットは2本脚を交互にに着地させている。よく見ると4本とも着地している瞬間があるかもしれない。
わんこたちは、静歩行と動歩行をいい感じで、使い分けているし、もっとフェーズを観察すると、もっと長いフェーズの中で動作をしているようにも見える(着地がかぶっているようにも見える)
本日はこの辺で。
そこで、どのようなパターンになるかを考えてみた。
ここでは75%をいったん忘れて考えてみることにした。
下に示す表(図?)は、1サイクルにおける動作を、着地しながら移動するスライド(S)、地面から足を話すリフト(L)、空中で前に足を動かすムーブ(M)、足を下すドロップ(D)としてあらわしてみた。
このパターンは、上記の4つの動作を均等に作業するきわめて効率がいいパターンで、最後の行は、ちそのフェーズにおいて着地しているSの数を示している。
このパターンは、4つの動作を均等に割り振っており、1サイクル中のSのデュレーションは25%であるので、ほとんどの期間で、どれか1本しか着地していない。
ちなみに、実際のわんこはこの歩き方をしない。が、1本でも着地していれば、次の着地する脚の力加減で、姿勢を維持することができる。
このパターンは、接地している区間が他の区間の合計に対して2倍になっている。
すべての期間において2本接地しているが、これでも次の時間帯を考慮しないと倒れてしまう。
このパターンは、接地している時間が、他の区間の合計の3倍としており、このため、常に3本の足が接地している。
SLMDの順序は、静方向においては、必ず一緒になるので、ほかの順序の組み合わせは見なくてもいいが、3本を接地させるためには、25%の時間で、75%の作業をしなければいけない理由がわかってもらえたと思う。
ただいろいろやっている中で面白いのを見つけた。
この例はステップで気には、先ほどの75%のものと」同じであるが、位相をちょっと変えてある。
今回の動作の目標は、必ず3本以上の足が接地地している状態を目指しているが、3本ではなく2本のところもある。しかもよく見ると4本接地しているところもある。
4本の間に姿勢を立て直せれば、早い時間に2本脚の区間を通り過ぎれば、実は、これでも行けるかもしれない。(この2本の不安定区間を時間軸でどうにかしようっていうのは、実は動歩行なんだけど)
動歩行への挑戦は、ちょっと先延ばしにするのが、先ほどの2本だけずっと着地しているバターンも動歩行(普通に歩いてるときはこれ)だし、全力疾走中のわんこは、4本をほぼ同時に着地して4本足で地面をけって加速し、次の瞬間すべての足が地面から離れている。
本物のスポットは2本脚を交互にに着地させている。よく見ると4本とも着地している瞬間があるかもしれない。
わんこたちは、静歩行と動歩行をいい感じで、使い分けているし、もっとフェーズを観察すると、もっと長いフェーズの中で動作をしているようにも見える(着地がかぶっているようにも見える)
本日はこの辺で。
タグ:robot





コメント 0