SpotMicro(mini) その9 ーアナログサーボに交換ー [ROBOT]
デジタルサーボを舵角の観点から、肩より下の2つのサーボをアナログにすることにした。
デジタルサーボで、すべて構成していたが、サーボが焼損もあるけど、コントロール基板も焼損した。
原因の究明はできてないけど、どうも、過電流で起きるしかないんだけど、燃えた基板を見てみることにした。
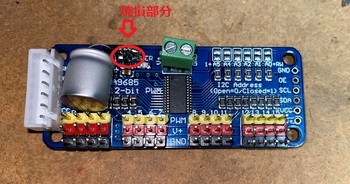
焼損部分には、MOSFETが付いているようだ。もともとこの基板はAdaFruitのもののようで、そのページを見ると、ここには、PchMOSFETはAOD417で設計されているようだが、どうも、買ったものとは、違っているようだ。SwichScienceで、最近のものが売られているが、これも本家の写真とも違う。また、秋月電子でも同じPCA9685を使ったサーボドライバが売っているが、このボードには、同様のFETがなく直結になっているので、直結することにした。
後、サーボにかける電圧を6Vから5Vに変更した。電池からの電圧をレギュレータを使って、6Vにしていたが、これを設定を変えて5Vにする。このため、若干サーボの速度が遅くなり、トルクも少し減るが、これで様子を見てみようと思う。
取り換えのタイミングで、使用しているサーボを並べてみた。

壮観。
デジタルサーボで、すべて構成していたが、サーボが焼損もあるけど、コントロール基板も焼損した。
原因の究明はできてないけど、どうも、過電流で起きるしかないんだけど、燃えた基板を見てみることにした。
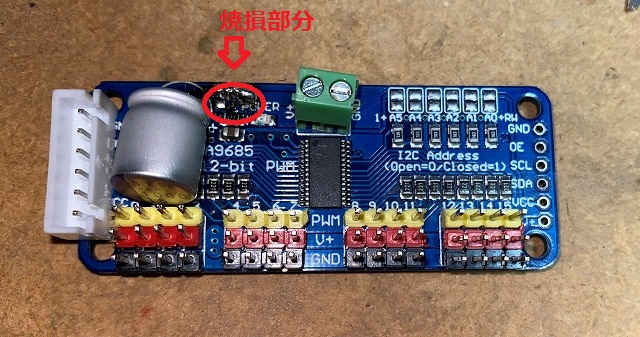
焼損部分には、MOSFETが付いているようだ。もともとこの基板はAdaFruitのもののようで、そのページを見ると、ここには、PchMOSFETはAOD417で設計されているようだが、どうも、買ったものとは、違っているようだ。SwichScienceで、最近のものが売られているが、これも本家の写真とも違う。また、秋月電子でも同じPCA9685を使ったサーボドライバが売っているが、このボードには、同様のFETがなく直結になっているので、直結することにした。
後、サーボにかける電圧を6Vから5Vに変更した。電池からの電圧をレギュレータを使って、6Vにしていたが、これを設定を変えて5Vにする。このため、若干サーボの速度が遅くなり、トルクも少し減るが、これで様子を見てみようと思う。
取り換えのタイミングで、使用しているサーボを並べてみた。

壮観。




コメント 0