トリガーゲージ [APS]
前々回の記事でコレでいいのSPI版のLCDを紹介した。
液晶画面というのは、いままでの入出力デバイスの中で、2次元でも表現できるとんでもないもんだと思う。それがチョチョイといじくれば、自分の思い通りに操作できるのはどう考えてもすごい。
これを自由に制御できるとうれしいなあ。でもなんに使うんだろ。
とかおもうまえに、グラフ表示を使用なんて思いついたんだけど、何に適用しようかと思ったら、
トリガーゲージ
置き針式のトリガーゲージだと、切れたときの重さは表現できるけど、そこにいたるまでの荷重変化は見えない。
世のなかそんなものは必要ないのであれば、作ってしまえとばかりにすでにつくられたかたが、ここにいるが、もうちょっとデジタルな感じでやってみることにした。
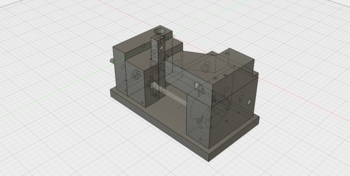
ということで、まずは、土台の設計から。ということで、いつものFUSION360で、図面作成。
おいらは製図なんぞはやったことないので、形状を作るという観点でしかできないし、強度計算なんかもできない。ただのモデリングツールとして使用。だけど、こいつは直感的でやりやすい。
で、去年の夏ごろお目見えした3Dプリンターによって、出力するだ。

で、印刷したパーツをくみ上げていくわけだけど、その段階の写真はないので、そのつもりで。
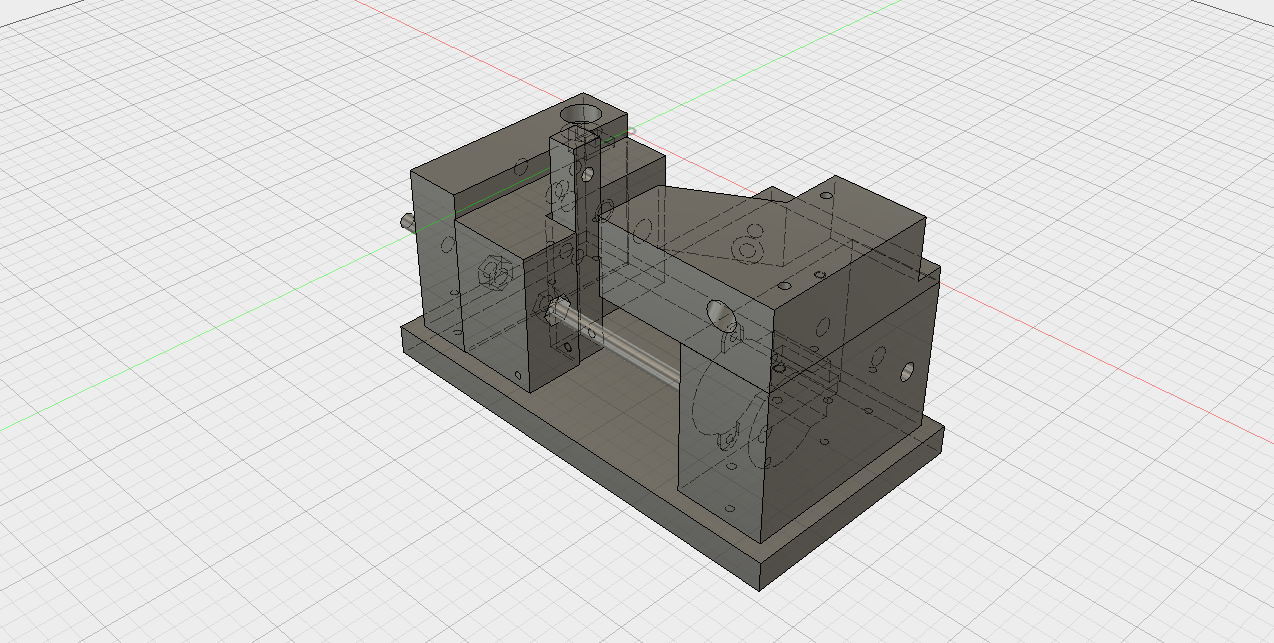
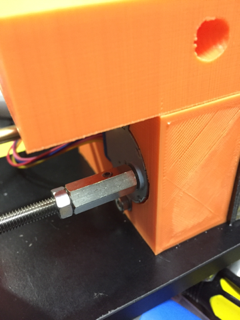
スライダーの移動は、ステップモータでドライブした、スレッドロッドなんだけど、実は、5mmの150mmのステンレスなべボルトの頭を落としたやつ。あたま落とさないほうが造形的に面白かったかもしれないけど、まあいい。

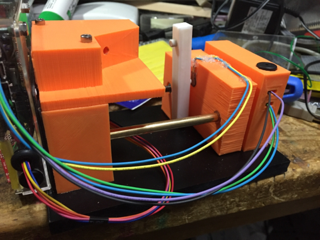
スライダーには、プレッシャーバーが設置されている。片方がねじ止めされていてそこを支点として、作用点に圧力センサ、力点にトリガーが当たるようになっている。明確にトリガーに当たるようにするために、そこには、電動消しゴムが半分の長さで搭載されている。

搭載されているセンサは、
スライダーゼロポジションセンサ(実はスイッチ)、圧力センサ、と音声センサが搭載してある。
音声センサは撃発を検出しようと思ったけど、定数の設定が悪いのか0ボルトまでキッチリ引きなくて、割り込みトリガにならない。0.4V位まではさがらないといけないけど、0.7Vまでしか下がらない。抵抗をもっとでかいのにすればいいとおもうけど、使わないことにした。

ユーザからの制御用の入力装置としては、スイッチが二つ。リセットスイッチと、実行スイッチ。
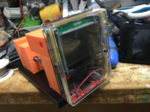
見えるかな。リセットスイッチは、コレでいいののリセットそのもので、リセット=コンピュータのリセットとなっている。
ソリッドステートのArduinoは、規模が小さいけど、処理が定型なら、その辺気にしなくて良いから良い。
リセットが押される。もしくは、電源が入ると、スライダーを左端に移動させる。動画だとすでに銃が載ってるけど、基本的には、銃はないとおもう。左端まで移動が終わると、LEDで準備完了を表示する。
このとき、と銃を置くに十分なクリアランスができるので、そこで、銃を設置し、コッキングを行い、測定ボタン(ビデオの中では実行ボタンだったり、ランボタンだったりいろいろ呼び方があるぼたんだけど)、を押すと計測が始まる。
動作が開始されると、開始点(最初にトルクがかかる点)を探しに良く。”Find start”。
スライダーは、トリガーに触れるまでは荷重がかからないので、荷重がかかるまでスライドし、0.5mmほど後退させ”Revert 0.5mm”、その点をトリガー0ポイントとする。
この時点で、画面は第1象限グラフに切り替わる。
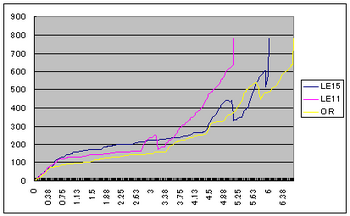
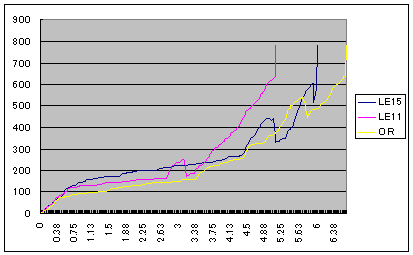
その後は、700g相当の荷重がかかるまで、右にスライド、荷重の計測を繰り返し、現在位置、と荷重をプロットしていく。
トリガーのリリースポイントまで行くとストンと荷重が減るところがあるので、その直前の最大値をトリガープルとして表示する。
その後も、後引きを表示するために、700gになるまで、加圧し続け、グラフを表示する。
ていうわけ。
このグラフのいままでの仕掛けだとできないはずだけど、説明は次回。
液晶画面というのは、いままでの入出力デバイスの中で、2次元でも表現できるとんでもないもんだと思う。それがチョチョイといじくれば、自分の思い通りに操作できるのはどう考えてもすごい。
これを自由に制御できるとうれしいなあ。でもなんに使うんだろ。
とかおもうまえに、グラフ表示を使用なんて思いついたんだけど、何に適用しようかと思ったら、
トリガーゲージ
置き針式のトリガーゲージだと、切れたときの重さは表現できるけど、そこにいたるまでの荷重変化は見えない。
世のなかそんなものは必要ないのであれば、作ってしまえとばかりにすでにつくられたかたが、ここにいるが、もうちょっとデジタルな感じでやってみることにした。
ということで、まずは、土台の設計から。ということで、いつものFUSION360で、図面作成。
おいらは製図なんぞはやったことないので、形状を作るという観点でしかできないし、強度計算なんかもできない。ただのモデリングツールとして使用。だけど、こいつは直感的でやりやすい。
で、去年の夏ごろお目見えした3Dプリンターによって、出力するだ。
で、印刷したパーツをくみ上げていくわけだけど、その段階の写真はないので、そのつもりで。
スライダーの移動は、ステップモータでドライブした、スレッドロッドなんだけど、実は、5mmの150mmのステンレスなべボルトの頭を落としたやつ。あたま落とさないほうが造形的に面白かったかもしれないけど、まあいい。
スライダーには、プレッシャーバーが設置されている。片方がねじ止めされていてそこを支点として、作用点に圧力センサ、力点にトリガーが当たるようになっている。明確にトリガーに当たるようにするために、そこには、電動消しゴムが半分の長さで搭載されている。

搭載されているセンサは、
スライダーゼロポジションセンサ(実はスイッチ)、圧力センサ、と音声センサが搭載してある。
音声センサは撃発を検出しようと思ったけど、定数の設定が悪いのか0ボルトまでキッチリ引きなくて、割り込みトリガにならない。0.4V位まではさがらないといけないけど、0.7Vまでしか下がらない。抵抗をもっとでかいのにすればいいとおもうけど、使わないことにした。
ユーザからの制御用の入力装置としては、スイッチが二つ。リセットスイッチと、実行スイッチ。
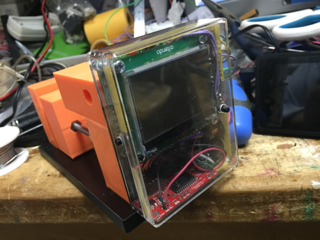
見えるかな。リセットスイッチは、コレでいいののリセットそのもので、リセット=コンピュータのリセットとなっている。
ソリッドステートのArduinoは、規模が小さいけど、処理が定型なら、その辺気にしなくて良いから良い。
リセットが押される。もしくは、電源が入ると、スライダーを左端に移動させる。動画だとすでに銃が載ってるけど、基本的には、銃はないとおもう。左端まで移動が終わると、LEDで準備完了を表示する。
このとき、と銃を置くに十分なクリアランスができるので、そこで、銃を設置し、コッキングを行い、測定ボタン(ビデオの中では実行ボタンだったり、ランボタンだったりいろいろ呼び方があるぼたんだけど)、を押すと計測が始まる。
動作が開始されると、開始点(最初にトルクがかかる点)を探しに良く。”Find start”。
スライダーは、トリガーに触れるまでは荷重がかからないので、荷重がかかるまでスライドし、0.5mmほど後退させ”Revert 0.5mm”、その点をトリガー0ポイントとする。
この時点で、画面は第1象限グラフに切り替わる。
その後は、700g相当の荷重がかかるまで、右にスライド、荷重の計測を繰り返し、現在位置、と荷重をプロットしていく。
トリガーのリリースポイントまで行くとストンと荷重が減るところがあるので、その直前の最大値をトリガープルとして表示する。
その後も、後引きを表示するために、700gになるまで、加圧し続け、グラフを表示する。
ていうわけ。
このグラフのいままでの仕掛けだとできないはずだけど、説明は次回。




またすごいの作っているなー
by RISKY (2016-02-18 11:19)
欲しい物が作れるというのは素晴らしいですね。
お暇なときにでもうちの個体も測ってみたいです。
by あかま (2016-02-18 16:34)
RISKY
さまコメントありがとうございます。
すごいの御言葉、まことにありがとうございます。
でもつくってみると、案外飽きてたりもします。
by siojake (2016-02-18 20:09)
赤間様、
コメントありがとうございます。
トリガー荷重は実は目安で、正確には測れないようです。
それでもよければ、次回の公式にでも。。。。
よろしくお願いします
by siojake (2016-02-18 20:19)