新しいも好きだからしょうがない [ドローン]
買ったドローンは、QX95ってやつで、FPVができる奴。
First Persons view (一人称映像とでもいうのか)の略らしいんだけど、受信機がない。
また、送信機は電波法でまだ免許がないので、飛ばせない。ついてるけど、電源が切れてる。
で、尺なので、ホバリングの練習してるんだけど、最初はじゃじゃ馬で、すげー困った。正直、とんでもないもん買ってまったとも思った。
先駆者で、たまたま同じ機種買ってるやつがいたので、かなり助かった。
ちょっと忘れたところもあるけど、思い出してメモ。
First Persons view (一人称映像とでもいうのか)の略らしいんだけど、受信機がない。
また、送信機は電波法でまだ免許がないので、飛ばせない。ついてるけど、電源が切れてる。
で、尺なので、ホバリングの練習してるんだけど、最初はじゃじゃ馬で、すげー困った。正直、とんでもないもん買ってまったとも思った。
先駆者で、たまたま同じ機種買ってるやつがいたので、かなり助かった。
ちょっと忘れたところもあるけど、思い出してメモ。
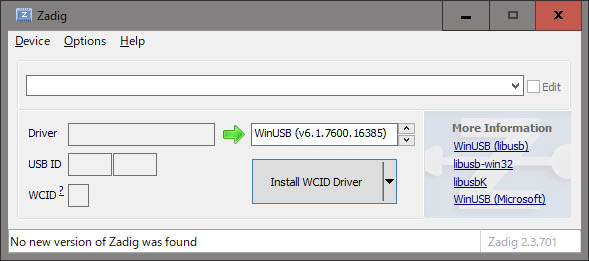
| 1 | フライトコントローラのファームウェアバージョンアップ。こいつがすげーめんどくさかった
| ||||||||||
| 2 | 機体への調整
|





コメント 0