SpotMicro(mini) その24 ー現状の到達点ー [ROBOT]
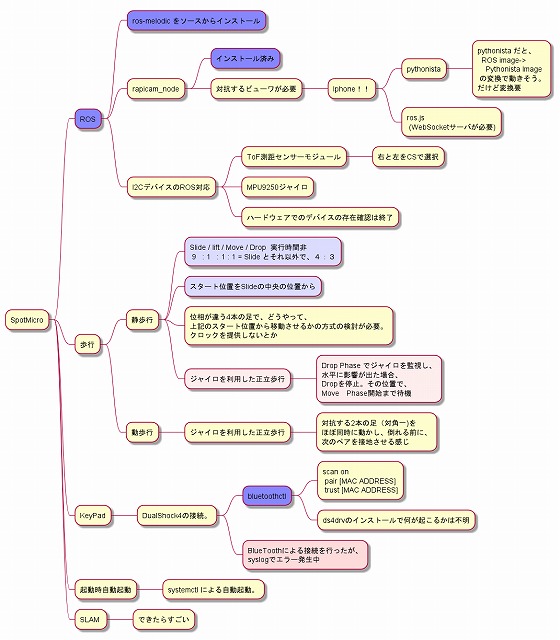
現状を確認するためにマインドマップを書いてみた。
これから先はプログラムとかかかないといけないから、何気にかけないから。
まあ、毎日書く必要のないんだけどこのブログは。
ははは。
静歩行実行中のフェーズで、足を下すところで、何かを踏むと、機体が傾くので、それをジャイロが検出した場合、卸している足を水平に戻るまで高さを戻して、その時の高さで、そのあとの行程を続けることができたら、ちょっとした段差なら、耐えることできないかなあ。と
歩行には動方向とか、お座りとかやりたいなあ。
一番やりたいのは、おしっこした後の土をけるやつ。
これから先はプログラムとかかかないといけないから、何気にかけないから。
まあ、毎日書く必要のないんだけどこのブログは。
ははは。
静歩行実行中のフェーズで、足を下すところで、何かを踏むと、機体が傾くので、それをジャイロが検出した場合、卸している足を水平に戻るまで高さを戻して、その時の高さで、そのあとの行程を続けることができたら、ちょっとした段差なら、耐えることできないかなあ。と
歩行には動方向とか、お座りとかやりたいなあ。
一番やりたいのは、おしっこした後の土をけるやつ。




コメント 0